





 Рейтинг: 4.3/5.0 (1912 проголосовавших)
Рейтинг: 4.3/5.0 (1912 проголосовавших)Категория: Инструкции

Сегодня на экране еще один герой роботехники — робот Электрон. Куплен в интернет магазине, но не китайском, поэтому вполне различает русскую речь и говорит по-русски.
Вывод один — если у вас есть мальчишки, которым его можно преподнести, то брать, брать, брать. Робот выполняет голосовые команды — танцует, поворачивает голову, стреляет дисками, ходит, отвечает на вопросы, причем почти на каждый вопрос у него 2 варианта ответа! Заинтригованы? Приглашаю под кат!
Итак, поехали! Знакомьтесь — Электрон!



Время эксплуатации — 8 месяцев, поломок нет. Был подарен сыну на 5-летие. Сразу он конечно был безумно доволен, пока не дошло дело до управления — вот тут и началось. Вредный робот не хотел слушаться сына, команды он перекручивал на собственный лад и вместо «привет» слышал «вперед», вместо «как тебя зовут» ему чудилась команда " в атаку" и он начинал наступление на владельца. Сын в панике убегал от него и кричал «выключи». Так что знакомство было не совсем радостным.
Однако все гости мужского рода, присутствующие на празднике по поводу дня варенья, были в диком восторге. Каждый говорил, «а вот был бы у меня такой в детстве!». В общем, день рождения удался — великовозрастные мальчишки, позабыв о угощении, вволю наигрались.
Потом Электрон был незаслуженно позабыт, вернее, не совсем забыт, сын хотел с ним играть, но управлять им должен был кто-то из взрослых, а на это не всегда хватало времени.
И только в конце лета Электрон наконец-то сдался и подчинился голосу сына.
Поэтому игрушку не советую покупать детям раньше 6 лет, или тем, у кого нечеткая дикция. Сын тогда не мог говорить букву «Р», может оттого Электрон и взбунтовал.
Да, еще маленькие дети от команды " в атаку" или «огонь» тоже могут испугаться — робот уверенно прет вперед, не забывая при этом стрелять в противника мягкими дисками, и беда, если детеныш окажется на линии огня! Оно конечно совсем не больно, но… мой боялся — это факт!
Правила пользования
Играть с роботом нужно в тихой обстановке, без постороннего шума и эха, так как в шумной обстановке робот плохо понимает команды.
Команды надо произносить четко, не смеша. Робот воспринимает команды с расстояния 1 метра.
Чтобы дать следующую команду, нужно дождаться выполнения предыдущей. Электрон не может принимать одновременно несколько команд.
Как это работает
Спасибо за внимание!
Планирую купить +23 Добавить в избранное Обзор понравился +45 +92



















«Месяц назад купили пылесос Iclebo ARTE. У нас двух этажный дом, убирать нужно было полдня в выходные.Сейчас уборка занимает 20 минут: поднять вещи, которые стоят у него на пути и протереть в труднодос. [читать далее] тупных местах.Это просто облегчение. не тратить время в выходной на уборку.Убирает очень хорошо, базу находит сразу, лестницу видит и обходит стороной.Зарядки хватает на уборку 180 кв. Покупкой очень довольна, реальный помощник, ламинат сияет, он его как бы полирует.Рекомендую.
P.S. Картинку взяла с сайта »
Катерина Рубенштова ,
Не скажу, г. Зеленогорск
отсутствует

«Приятные сотрудники. Все объяснят,подскажут,расскажут.
Приобрела двух роботов(Scooba 390 и Roomba 790). Доставили в дождь и в срок, что в Москве редкость.
Спасибо.»
Романова Ольга ,
Финансовый директор компании "КБС", Москва

«Купил робота-пылесоса несколько месяцев назад в этом интернет-магазине за 12 или 13 тыс. руб. Вполне им доволен, даже имя дали ему, он у нас вместо домашнего питомца. Стулья стараемся поднимать, "ценн. [читать далее] ые" вещи с пола подбирать. Убирает пол и ковер на хорошо. А вот с ковром в детской не справляется, потому что ворс неровный (с декоративными вырезами). Шумноват. Дочки (5 с половиной лет и 8 месяцев) от него в восторге. »
Мы в социальных сетяхНа данной странице вы можете скачать интрукции к собакам-роботам:
Данные инструкции помогут вам разобраться, как играть с домашним питомцем, как ухаживать за игрушками.
Также инструкции к собакам-роботам помогут вам разобраться с возможными неполадками игрушек, причинами их возникновения и способам решения проблем.
Скачать инструкции к Zoomer, Teksta и Aibo вы можете здесь:
Перед использованием игрушки обязательно прочтите инструкцию, так как игрушка стоит достаточно дорого и будет обидно, если вы ее сразу же сломаете, неудачно поиграв с ней.
Собаки-роботы достаточно послушны, а инструкции к ним понятны и просты. Стоит отметить, что картинки в инструкциях помогают разобраться с игрушкой даже самым маленьким детям, не говоря уже о взрослых.
Популярные статьи:
Собака-робот Зуммер породы Далматинец - все интересные факты, которые вы хотели узнать о данном роботе. Где купить, как играть, какие команды выполняет, чем отличается от других и многое другое в нашей статье.

Узнайте, как правильно играть с собакой-роботом Текста, какие она умеет выполнять команды, как запрограммировать Teksta на выполнение отдельных команд и дрессировать. Скачивайте приложение для робота-собаки Текста и играйте в удовольствие!

Узнайте все о разновидностях щенков Zoomer, об их окрасах и породах, которые были изготовлены. Полезная информация для всех, кто собирается приобрести себе или в подарок удивительного интерактивного щенка Зуммер.
Ваши Комментарии Разделы сайта Плохо или хорошо приучать ребенка к роботизированным игрушкам? Какое влияние они могут оказать? Способны ли они помочь обучению или только вредят?
Плохо или хорошо приучать ребенка к роботизированным игрушкам? Какое влияние они могут оказать? Способны ли они помочь обучению или только вредят? Небольшой фильм про владельцев собачек-роботов Сони Айбо и их жизнь со своими домашними питомцами. Фильм отлично показывает то, насколько даже взрослые люди привязываются к своим интерактивным питомцам.
Небольшой фильм про владельцев собачек-роботов Сони Айбо и их жизнь со своими домашними питомцами. Фильм отлично показывает то, насколько даже взрослые люди привязываются к своим интерактивным питомцам. Вторая часть ответов на вопросы о популярной игрушке Zoomer. Многие пользователи сталкиваются с различными проблемами, присылают нам свои вопросы и мы пытаемся найти и дать на них ответ!
Вторая часть ответов на вопросы о популярной игрушке Zoomer. Многие пользователи сталкиваются с различными проблемами, присылают нам свои вопросы и мы пытаемся найти и дать на них ответ! Все пользователи собаки-робота обычно сталкиваются с типичными проблемами, которые невозможно решить без посторонней помощи. Мы собрали самые популярные вопросы про игрушку!
Все пользователи собаки-робота обычно сталкиваются с типичными проблемами, которые невозможно решить без посторонней помощи. Мы собрали самые популярные вопросы про игрушку!Сайт посвящен собакам-роботом и всему, что с ними связано. Мы будем держать вас в курсе самых последних новостей. О том, где купить собак-роботов, что они умеют, какие бывают узнаете тут. Скачивайте инструкции:
Свяжитесь С НамиОбязательно приходите к нам на сайт чаще. Информация на сайте не является публичной офертой. До связи!
Адрес: Москва и Московская область, Россия
E-mail: mne.robot@yandex.ru

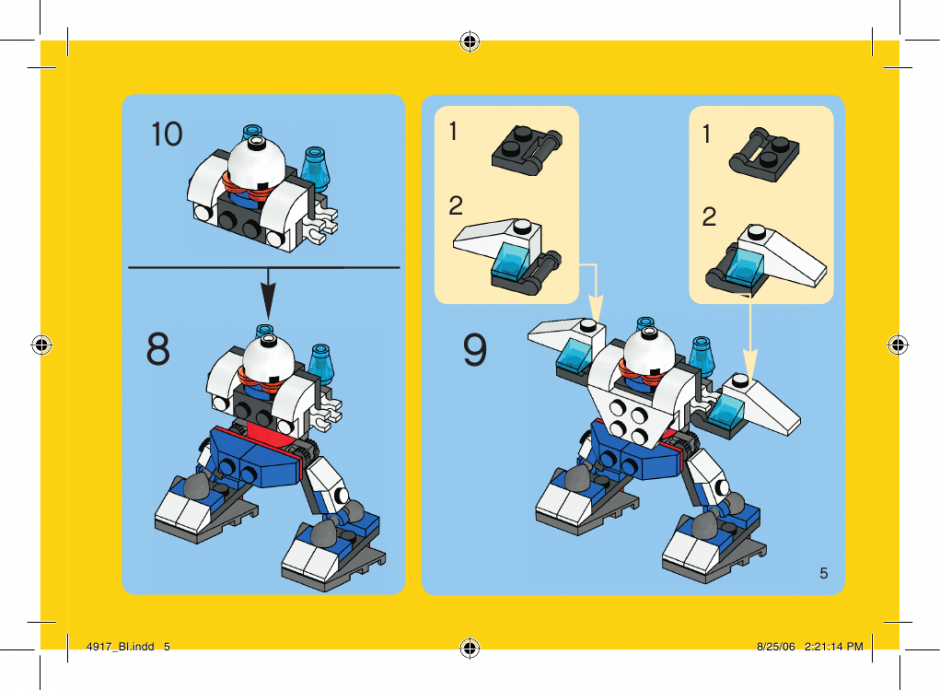
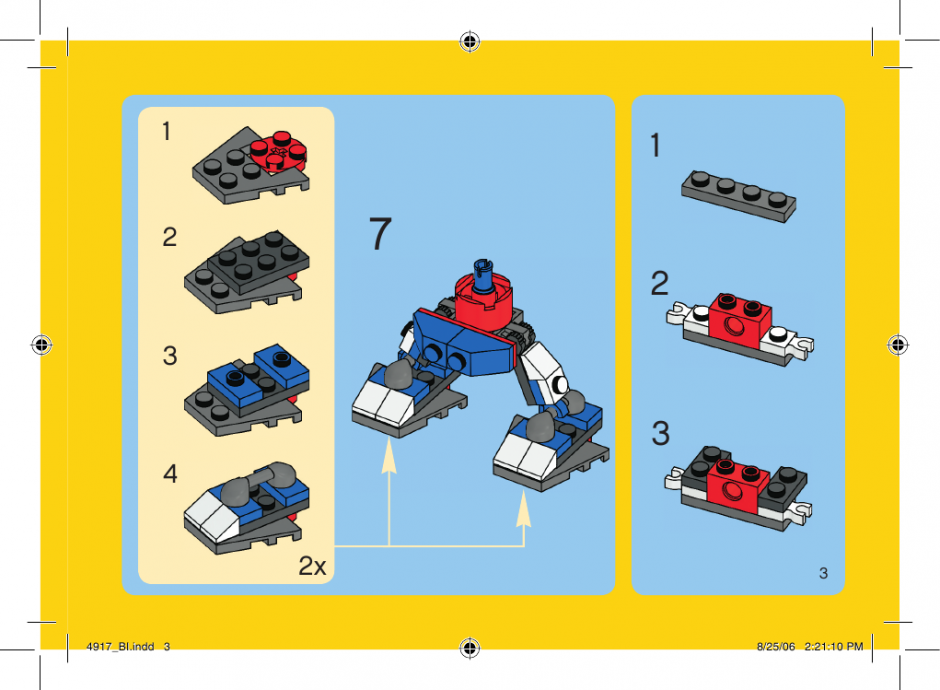
MindCuber ( Миндкубер ) – семейство из нескольких роботов, которые могут решать и собирать известную головоломку “Кубик Рубика”.
Соберите собственного робота, собирающего “Кубик Рубика” с помощью наборов LEGO® EV3® MINDSTORMS®.
Подробные инструкции по сборке на сайте http://mindcuber.com/ ( на английском языке )
Далее здесь представлен краткий перевод на русский язык этой инструкции.
Как сделать робота, собирающего “Кубик Рубика”, с помощью набора LEGO MINDSTORMS EV3 (Home set 31313) ?
Роботы EV3 и инструкции по сборке.
Инструкция по сборке и программированию робота из наборов LEGO TECHNICS, LEGO MINDSTORMS EV3.
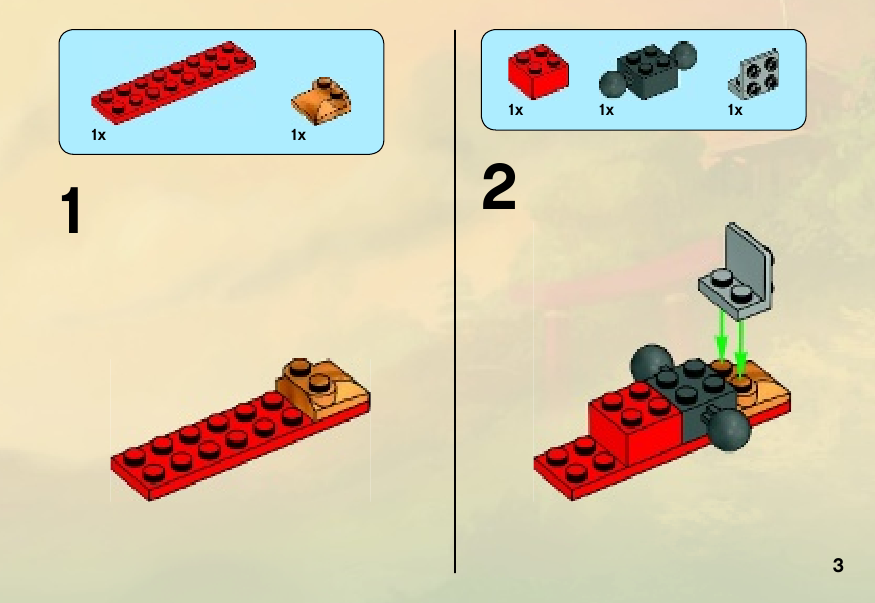
1. Собрать механизм робота целиком по инструкции с сайта mindcuber.com – скачать инструкцию по сборке механизма в формате PDF
2. Установить необходимое программное обеспечение:
Убедитесь, что версия прошивки вычислительного блока EV3 – v1.06H или более свежая.
Всегда рекомендуется обновлять прошивку до последней версии на официальном сайте LEGO.
При необходимости скачиваем новую прошивку (встроенное ПО EV3 MIDSTORMS),
а также программное обеспечение LEGO EV3 MINDSTORMS ( PC или MAC ) ссылка .
Затем необходимо установить модифицированную поддержку Сенсора RGB (Color Sensor RGB Block) – датчика, который определяет цвет объекта.
Скачиваем файл нового блока ColorSensorRGB-v1.00.ev3b. И устанавливаем новый блок в оболочку программы LEGO EV3 MINDSTORMS на компьютере.
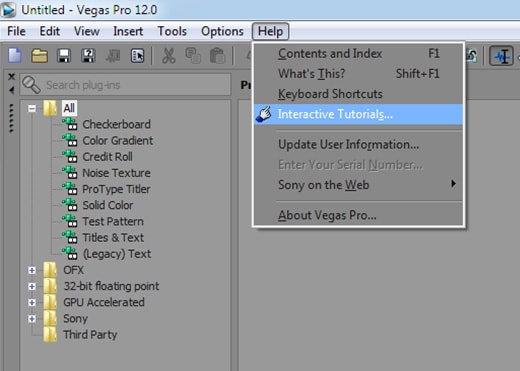
Для этого используем в программе меню Tools и Block Import .
Следующий этап – установка самой программы для робота, которая считает, решает головоломку и управляет механизмом для вращения граней “Кубика Рубика”.
Закачиваем версию для LEGO MINDSTORMS EV3 (Home set 31313 – домашняя версия, именно она продается в магазинах LEGO) ссылка для загрузки .
Распаковываем архив. Мы имеем три файла.
Первый файл MindCub3r-v1p6.ev3 – файл проекта для программного обеспечения на компьютере.
Второй файл mc3solver-v1p6.rtf – запускаемая на центральном блоке EV3 программа для робота,
выполняет поиск решения для Кубика Рубика.
Третий файл InstallMC3-v1p6.rbf – установщик для предыдущей программы.
Теперь открываем файл проекта MindCub3r-v1p6.ev3 в программном обеспечении на компьютере с помощью меню File и Open Project.
Перевод на русский язык инструкции по сборке робота MindCuber LEGO EV3 MINDSTORMS.
Based on mindcuber.com
Примечание:
Если MindCub3r собирает кубик неправильно, ошибки следует искать в механической части (провороты, пропуски движения)
или в ошибке распознавания цветов граней Кубика Рубика.
Грани должны быть стандартных цветов, кубик должен крутиться, поворачиваться очень легко, без торможения и заеданий.
MindCub3r использует стандартный алгоритм сборки Кубика Рубика.
После определения цвета каждого элемента всех граней, значения цветов заносятся в многомерный массив и производится вычисление кратчайшего решения головоломки.
Затем в дело вступает чистая механика.
Начинать работу с Arduino, как и с любой другой платформой программной или аппаратной, всегда интереснее с какого-нибудь реального проекта. Программисты при этом пишут код выводящий «Hello, world», ардуинисты моргают светодиодом. И все радуются как дети.
Я же решил начать с продвинутого проекта, в том числе с тайной надеждой оторвать молодое поколение от Counter-Strike.
Как можно догадаться из названия RoboCar4W. первым проектом стал робот-машина о четырех колесах. Начиная работу я уже имел опыт программирования, умел когда-то давно паять, но совершенно не знал даже распиновки Arduino и документацию совершенно не читал. Все премудрости изучал по ходу пьесы и гугл в помощь.
Поскольку сам проект принципиально не нов, подобных описаний в сети достаточно, все компоненты известны, то никаких неожиданностей не предполагалось. Поэтому задумка была сформулирована в самых общих чертах и главной целью являлось погружение в «мир вещей» с помощью Arduino, как платформы для быстрого прототипирования. В этом опусе возможно кто-то узнает себя в самом начале пути.
Всё железо приобреталось на ebay, и по своему опыту хочу сказать, что проще приобрести сразу стартер кит (ищите по словам Arduino Starter Kit), а не собирать подетально. Да и приедет все сразу вместе.
Какую плату семейства Arduino выбрать?
Я взял Arduino UNO, под нее много проектов с описаниями. Но сейчас бы взял Arduino Mega 2560, у нее больше цифровых и аналогов выводов и полная совместимость по проектам с UNO.
Главный секрет успешных покупок на eBay — покупать у продавцов с высоким рейтингом и при этом внимательно читать описание товара. Об этом есть много статей в интернете.
Общее описание проекта RoboCar4WВ мире разработки программного обеспечения это называют еще «требования к системе».
Задумка проекта была следующей. Первая версия машины-робота под названием RoboCar4W должна выполнять незамысловатые действия:
Второй вариант машины должен управляться вручную по bluetooth с Android телефона.
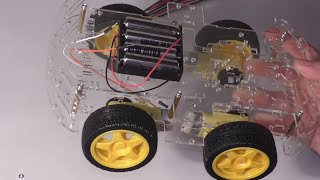
Чтобы вам лучше работалось вот весь финальный проект RoboCar4W в сборе (тут без блютуза).

Проект RoboCar4W в сборе
Вот видео ходовых испытаний.
На первом видео RoboCar4W ездит в автоматическом режиме с объездом препятствий на двух разных версиях «прошивки», т.е. скетча, поэтому, если кто самый зоркий и заметил, что поведение робота в разных эпизодах немного отличается.
На втором видео RoboCar4W передвигается при помощи команд, передаваемых «водителем» по Bluetooth с мобильного телефона под Android. На телефоне установлена программа «Bluetooth RC Car». Причем, если близко впереди оказывается препятствие, то робот останавливается, т.е. протаранить что-нибудь не получится (однако есть «секретная» кнопка, которая отключает безопасный режим).
На третьем видео RoboCar4W показывает заранее запрограммированную демо-программу движения с поворотами. Демо-программа активируется по команде с того же мобильного телефона под Android. Робот просто едет некоторое время и делает повороты.
Алгоритм управления движениемВажный момент, на котором никто в своих проектах не заостряет внимание — это алгоритм работы вашей поделки. В данном конкретном случае — это то, как именно будет ездить наш робот-кар.
Если мы что-то упустим сейчас, то в дальнейшем возможно нам понадобятся дополнительные детали, сенсоры, а путь из Китая не близкий. Это в лучшем случае, в худшем вся работа окажется насмарку. Это как паять без канифоли. Так что лучше обдумать всё именно сейчас.
Большая ошибка называть наш способ «алгоритм объезда препятствий» или «поиском пути». Это отдельные математические дисциплины, чистая математика. Если вам очень-очень сильно нравится математика, то погуглите указанные словосочетания, чтивом на полгода будете обеспечены.
Пока же нас интересуют вещи гораздо проще. Поэтому мы назовем это правильно и точно — алгоритм управления движением 4-х колёсного робота. Разумеется речь идет об автоматическом управлении без участия человека.
Вот этот простой алгоритм записанный словами, для более сложных алгоритмов придется (хочется или нет) составлять блок-схемы.
Чем хорошо, что у нас 4 колеса и все ведущие? Мы можем выполнить (запрограммировать) несколько типов поворотов:
Во втором варианте программы, при управлении с Android-телефона безопасный режим, когда робот старается не допускать лобовых столкновений, может быть отключен, если в программе два раза нажать кнопку  и включен обратно однократным её нажатием.
и включен обратно однократным её нажатием.
Важное примечание. Вся логика находится под управлением Arduino. Android здесь выступает просто как игровой пульт (без мозгов) от консоли, его задача — тупо передавать нажатия кнопок (т.е. команды) посредством Bluetooth в Arduino RoboCar4W.
КомпонентыПервоначально в состав машины входил сервопривод, который поворачивал ультразвуковой измеритель расстояния на определенный угол для измерений по трем направлениям. Но в ходе испытаний из-за неосторожного обращения сервопривод сгорел, поэтому теперь датчик расстояния просто жестко закреплен впереди корпуса.
Нет худа без добра, зато скетч стал немного проще.
На будущее, сервопривод покупайте самый простой и дешевый, особая мощность, скорость и точность поворота на заданный угол не нужны, а вывести серво из строя довольно легко, как оказалось. Вполне подойдет SG90 стоимостью $2.
Итак составные части проекта RoboCar4W, описание на английском дается для облегчения поиска на ebay и ему подобных:
Шасси, DC моторы и колеса приобретались сразу в комплекте и даже с инструкцией по сборке.
РаспиновкаОпять и снова суперважный момент, на котором нигде не акцентируется внимание. Вы заранее должны спланировать, какие пины Arduino и всех шилдов (дополнительных плат) под что конкретно будут заняты.
Аналоговые входы могут использоваться как цифровые выводы портов ввода/вывода. Выводы Arduino, соответствующие аналоговым входам, имеют номера от 14 до 19. Это относится только к выводам Arduino, а не к физическим номерам выводов микроконтроллера Atmega.

Рисовать не обязательно, можно просто свести все в таблицу. У меня получилось так.
Пины D4, D7, D8, D12 будут заняты, если используются любые DC моторы или шаговые.
Пины D9 (Servo #1 control), D10 (Servo #2 control) будут заняты, только если используются сервомоторы.
Сама по себе плата для управления моторами Motor Drive Shield L293D пины Arduino не занимает.
Пины питания 3.3 В, 5 В и «земля» дублируются на Motor Drive Shield в достаточном количестве. Поэтому об их нехватке не стоит беспокоиться.
Если все-таки хотите красиво нарисовать, то бесплатная программа Fritzing вам в помощь. Вот короткое, но красноречивое видео о возможностях этой программы.
ПитаниеЭто второй очень важный момент создания прототипов. И опять никто в сети не акцентирует на нем внимание. Как будто всё само собой происходит.
На самом деле от питания зависит очень многое. Например, серво-мотор при повороте вала на заданный угол начинает потреблять большой ток. При этом если серво подключен по питанию на 5 В Arduino, то происходит «просадка» по напряжению и вся остальная схема начинает глючить, а Arduino даже может перезагружаться при этом.
В любом случае, если в поделке используете моторы, то Motor Drive Shield необходим (или подобная ему схема).
Вопрос питания подробно рассмотрен в посте Arduino. «Кушать» подано. где мне удалось избежать применения еще одной детали — DC/DC преобразователя напряжения, которого у меня не было в наличии.
Вопрос «как правильно протестировать аккумуляторы» подробно рассмотрен здесь «Проверка аккумуляторной батареи». С поправкой на вольтаж, описанный рецепт можно использовать и для Ni-MH аккумуляторов.
Сборка Arduino RoboCar4WСобрать готовое шасси небольшая проблема. Но не думайте, что без допиливания у вас всё сразу соберется. Поэтому приготовьте надфили.
Провода для моторов китаец прислал слишком жесткие и, чтобы не выломать контакты у моторов, зафиксировал провода изолентой.

RoboCar4W сборка шасси

RoboCar4W сборка шасси

RoboCar4W сборка шасси
Колеса продаван укомплектовал с разными протекторами, это понятно чтоб веселей было. Ну да нам не на чемпионате мира выступать, простим.

Далее присоединяем моторы к плате управления, все премудрости описаны здесь «Arduino. Motor Drive Shield L293D» .
После этого необходимо прогнать тест моторов. Скетч для тестирования можно взять здесь. В начале скетча измените номер мотора в строке (или в строках) типа:
Скетч некоторое время вращает мотор(ы) вперед по ходу движения робота, а затем назад. Посмотрите внимательно в ту ли сторону вращается мотор, и измените полярность подключения если нужно.
Подключаем ультразвуковой измеритель расстояния HC-SR04 Ultrasonic Module. Распиновка выводов:
Время затрачиваемое ультразвуковым дальномером на измерения (определено опытным путем):

Ультразвуковой измеритель расстояния HC-SR04 Ultrasonic Module
Ультразвуковой датчик дальномер, в силу своей физической природы, а не потому что Китай, в некоторых случаях плохо определяет расстояние до препятствия:
Другими словами, для ультразвукового дальномера в идеале было бы отлично, если бы все препятствия имели вид твёрдой плоскости, перпендикулярной направлению излучения ультразвука.
Некоторые проблемы можно решить с помощью инфракрасного датчика расстояния. Но он тоже не идеален:
Хотя если установить эти дальномеры в паре, то эффективность их работы заметно повысилась бы.
Далее подготавливаем блютуз-модуль как описано в посте «Arduino. Паяем, подключаем Bluetooth HC-05». Подключаем к пинам как указано в таблице.
Программное обеспечениеПримечание. Каждый раз перед загрузкой программы в Arduino, убедитесь, что модуль Bluetooth не подключен к Arduino. Это вызовет проблемы заливки скетча. Просто отсоедините питание от Bluetooth модуля или провода, соединяющие Arduino и RX, TX контакты модуля.
В начале скетча измените номера моторов в строках типа:
Если заменить строку
то включится режим отладки.
В режиме отладки робот RoboCar4W реально ездить или крутить колесами не будет. Вместо этого активируйте монитор последовательного порта и там увидите как он «ездит» виртуально. Вместо реальной езды вперед в монитор последовательного порта будет писаться строка «Forward», вместо заднего хода с поворотом влево — «Turn Back L» и т.д. Датчик ультразвукового измерения расстояния тоже ничего не делает, вместо этого расстояния до препятствий генерируются программно и случайно.
Этот режим отладки удобен, если вы меняете алгоритм движения и вместо того, чтобы ловить машинку по комнате, просто проверяете всё на «холостом» ходу.
Скетч для ручного управления по блютуз скачать здесь. Скетч не имеет режима отладки, так как там всё прозрачно. Вы нажимаете кнопку — робот едет.
Ну вот и все! Счастливой дороги!

 представитель последнего поколения роботов-пылесосов. При его разработке взяли за основу лучшие достоинства 500-й серии, а также применили самые современные инновации. iRobot Roomba 780 результат самых последних технических находок в области уборки полов. Новые возможности позволят Вам по-новому взглянуть на возможность использования роботов в Вашем доме. С новыми функциями и новым стильным дизайном, он обеспечивает самую качественную уборку день за днем.
представитель последнего поколения роботов-пылесосов. При его разработке взяли за основу лучшие достоинства 500-й серии, а также применили самые современные инновации. iRobot Roomba 780 результат самых последних технических находок в области уборки полов. Новые возможности позволят Вам по-новому взглянуть на возможность использования роботов в Вашем доме. С новыми функциями и новым стильным дизайном, он обеспечивает самую качественную уборку день за днем.
Краткое содержание инструкции для роботов пылесосов 760 / 765 / 770 / 776 / 780 / 785 / 790
Для достижения наилучших результатов. 1
Начало работы. 2
Перед первой эксплуатацией робота пылесоса
переверните устройство и извлеките язычок батареи. Используйте базу Home Base™ для зарядки батареи в течение ночи.
Подготовка участка для уборки. 2
iRobot Roomba 780 способен перемещаться по комнатам самостоятельно, но ему все же
требуется помощь. Ковровые кисточки не представляют проблем, но следует устранять нагромождения проводов и убирать незакрепленные кабели.
Устройство предназначено для вытирания пыли, уборки мусора и сажи, но избегайте влажных участков.
Настройка. 2
Сначала установите базу Home Base™. Чтобы робот-пылесос Roomba 780 следовал по правильному пути, установите ручные или автоматические устройства Virtual Wall, которые изолируют участки, либо устройства Virtual Wall ® Lighthouse™ (только для моделей 780 и выше), чтобы
активировать уборку в нескольких комнатах.
На уборку. 2
При наличии настройте беспроводной центр управления или пульт ДУ. В противном случае просто запустите робота Roomba вручную.
• Чтобы включить, нажмите кнопку CLEAN (уборка). Раздастся звуковой сигнал, и загорится кнопка CLEAN.
• Чтобы запустить цикл уборки, снова нажмите кнопку CLEAN.
• Если находится на базе Home Base, просто нажмите кнопку CLEAN
• Чтобы приостановить работу во время уборки, нажмите кнопку CLEAN.
• Чтобы возобновить работу робота, снова нажмите кнопку CLEAN.
• Чтобы выключить: нажмите и удерживайте кнопку CLEAN, пока она не погаснет.
Затем просто отойдите и позвольте своему роботу-пылесосу Roomba приступить к
работе.
Режимы и маршрут уборки
Технология iAdapt позволяет активно следить за чистотой помещения более 60 раз в секунду и реагировать посредством более чем 40 различных маневров для более тщательной уборки помещения.
В 700-хсерииможно выбрать 3 режима уборки.
Clean Mode (Режим уборки) – автоматически рассчитывает
площадь помещения и соответствующим образом регулирует время уборки.
Spot Mode (Режим уборки участка) –движется по спирали диаметром приблизительно 1 м (3 фута) и затем возвращается к исходному месту – интенсивная и локализованная уборка для быстрого достижения результата.
Scheduled Cleaning Mode (Режим уборки по графику) – робот-пылесос Roomba
покидает базу Home Base, убирает помещение и после завершения возвращается н
подзарядку.
Поверхности
работает практически на любых поверхностях (деревянный пол, ковер, плитка, виниловое покрытие и линолеум), приспосабливаясь к различным типам напольного покрытия. Устройство избегает падения, автоматически распознавая ступеньки и другие изменения уровня пола. может остановиться при столкновении с закругленными краями и соскользнуть при движении по очень скользким поверхностям Очень темные напольные покрытия могут затруднить работу датчиков устройства. Он не предназначен для использования вне помещений.
Система против запутывания
Не запутается в ковровых кисточках или бахроме. Если устройство распознает переплетение, то автоматически останавливает основные щетки и начинает вращать их в обратном направлении, чтобы освободиться. При этом может издаваться щелкающий звук.
База Home Base
Установите базу Home Base на твердой и ровной поверхности у стены. Убедитесь, ч
расстояние до ступенек составляет не менее 1,5 м (4 футов) и что на пути к ним нет
никаких препятствий. Когда робот Roomba завершит уборку, он возвратится на базу Home Base для подзарядки. Индикатор на базе Home Base перестанет мигать и, когда будет
установлено хорошее соединение с базой, загорится постоянным зеленым цветом. Затем индикатор заряда батареи начнет мигать янтарно-желтым цветом, что свидетельствует о процессе зарядки, и загорится постоянным зеленым цветом, когда полностью зарядится и
будет снова готов к уборке!
Дополнительное устройство Virtual Wall® для всех моделей.
Ручное устройство Virtual Wall
• Включите устройство Virtual Wall вручную в начале цикла уборки. По истечении
135 минут оно выключится. Если индикатор питания мигает зеленым цветом, это
означает, что вскоре понадобится заменить батареи.
Автоматическое устройство Virtual Wall
Вспомогательное устройство Virtual Wall Lighthouse™ (только для
моделей 780 и выше). 4
Принцип использования режима Lighthouse. 5
Принцип использования режима Virtual Wall. 5
Хранение и зарядка батареи. 5
Способ извлечения батареи. 6
Значки пользовательского интерфейса. 6
Пульт дистанционного управления. 7
Беспроводной центр управления. 7
Составление графика уборки. 7
Позволяет пользователю точно задать время уборки, даже при отсутствии в доме владельца устройства. Можно настроить на уборку раз в день до семи раз в неделю.
Настройка времени. 7
Настройка 12-/24-часового формата. 7
Составление графика уборки. 7
Просмотр графика уборки. 8
Удаление графика уборки. 8
Изменение графика уборки. 8
Простое техническое обслуживание продлевает срок службы. 8
Чтобы поддерживать идеальное рабочее состояние рекомендуется регулярно проводить простое техническое обслуживание. В частности, обратите внимание на указанные ниже рекомендации.
Ищите желтые детали – их следует извлекать и очищать.
Необходимо опорожнять емкость для мусора и очищать щетки после каждого
использования робота, если это возможно.
Чрезмерное скопление волос может полностью вывести из строя робот-пылесос Roomba или повредить напольное покрытие, поэтому регулярно очищайте подшипники и колпачки щеток.
Основные операции по техническому обслуживанию. 9
Опорожнение емкости для мусора
Очистка двух фильтров
Очистка щеток и соответствующих деталей
Очистка переднего колеса
Очистка датчиков емкости для мусора (только для моделей 770 и выше)
Очистка датчиков падения
Поиск и устранение неисправностей
Проблемы в процессе уборки. 11
Проблемы в процессе зарядки. 12
Режим выбора языка сообщений. 12
Сообщения о поиске и устранении неполадок на английском, французском, немецком, испанском, итальянском, голландском, датском, шведском, норвежском, финском, польском, русском, португальском, японском, корейском и китайском языках.
Установка языка. 12
Процедура сброса программного обеспечения. 13
Нажмите и удерживайте кнопку CLEAN в течение десяти секунд. Это действие сбросит
настройки времени и может прервать успешное подключение к базе для нескольких
первых циклов зарядки.
Часто задаваемые вопросы. 13
Важные инструкции по технике безопасности. 13
Комплект и зарядка батарей. 14
Сервисная служба. 14
Подходит к моделям iRobot Roomba 760 / 765 / 770 / 776 / 780 / 785 / 790
Руководство пользователя / инструкция
Язык: Русский
Страниц: 16
Формат: PDF
Размер: 2.75 Mb
Скачать инструкцию к роботу пылесосу iRobot Roomba 760 / 770 / 780 / 790
ДОСТАВКА ПО МОСКВЕ БЕСПЛАТНО!
По просьбам наших покупателей, выкладываем инструкцию на русском языке для робота-пылесоса Good Robot. Теперь она будет постоянно доступна на нашем сайте.
ОписаниеGoodRobot — это робот-пылесос последнего поколения. Благодаря мощной силе всасывания и турбощетке, он легко справляется с загрязнениями на ковровых покрытиях, плитке, паркете и линолеуме, «пролезает» в труднодоступные места под кроватью и другой мебелью, производит сухую и влажную уборку.
GoodRobot не оставляет шанса болезнетворным бактериям и аллергенам, уничтожая их с помощью ультрафиолетовой лампы. Он не испортит мебель, потому что имеет датчики столкновения и перепада высоты, не позволяющие ему упасть с лестницы или стола. Мощный аккумулятор и большой контейнер для мусора позволяют убирать больше пространства, а когда он разряжается, то сам возвращается на базу для подзарядки.
В комплекте есть пульт управления и виртуальная стена, с помощью которой Вы сможете ограничить область уборки и таймер для программирования времени уборки на день или даже неделю вперед, а встроенный ароматизатор наполнит Ваш дом любимым ароматом.
Основные преимущества Good Robot:



Начать чистку или приостановить ее.

Указывает, что пылесос работает в автоматическом режиме чистки.

Указывает, что пылесос работает в режиме следования по стене.
Указывает, что пылесос работает в режиме точечной очистки.

Указывает, что пылесос работает в режиме тщательной очистки.
Путь движения в данном режиме такой же как и в авто режиме. При этом будет производиться автоматический поиск док станции при понижении заряда батареи.

Указывает, что пылесос работает в режиме автоматической подзарядки.
Робот будет искать док-станцию для подзарядки при понижении заряда батареи.

Указывает установленное время чистки.
Робот отъезжает назад, поворачивает налево или постоянно поворачивает направо
Робот может застрять в процессе чистки. Если робот застрял, достаньте его из этого места.
Пылесос упал с лестницы
Робот может распознавать высоту ступеньки на лестнице более 8 см. Тем не менее, обнаружение препятствий может быть недостаточным, если поверхность имеет сильное отражение. В таком случае, пожалуйста, установите виртуальную стену, чтобы предотвратить падение робота вниз. Если поверхность в нормальном состоянии, пожалуйста, проверьте сенсоры поверхности, чисты они или нет. После очистки сенсора, если ситуация не изменилась, пожалуйста, обратитесь в сервисный центр.
Робот плохо работает или чистящий эффект недостаточный
Выключите робот, достаньте мусорный ящик.
Проверьте следующие детали:
Усилился шум при чистке
Выключите робот, достаньте мусорный ящик и прочистите от мусора. Затем переверните робота вверх дном для проверки.
Робот не работает в текущем режиме чистки
Проверьте заряд батареи и включите робота на автоматический режим подзарядки.
Вопросы и ответыОтвет: Все зависит от условий поверхности и выбранного Вами режима очистки. Обычно робот работает до 70 минут на деревянном, плиточном полу и других плоских поверхностях и до 50 минут на короткошерстном ковре.
Ответ: Встроенная батарея может использоваться не менее 500 циклов, а если во время эксплуатации не возникло никаких повреждений батареи, то она может использоваться более 500 циклов.
Ответ: Недостаточный уровень заряда батареи, робот автоматически переходит в режим подзарядки.
Ответ: Мусорный мешок заполнен, произведите очистку, так же проверьте основную щетку, возможно на ней скопилось большое количество волос и ее так же необходимо очистить.
Ответ: Проверьте, возможно, робот находится в режиме «отмена времени чистки», робот не будет работать автоматически, пока не будет выполнена автоматическая одноразовая чистка.
Ответ: Для предотвращения падений, в робот встроены фоточувствительные элементы для обнаружения более 8 см перепадов уровня поверхности.
Ответ: Плоская конструкция робота позволяет ему передвигаться под столом, шкафом, кроватью и т.д. в случае, если размер проема более 10 см.
Ответ: Если дистанция превышает расстояние 5 м, пульт управления не будет действовать. Проверьте заряд батареи пульта управления и заряд робота.
Прочистите инфракрасный передатчик и приемник чистой тканью. Возможно, пульт управления получает сигналы от находящейся поблизости виртуальной стены, зарядочной станции или другого оборудования, которое передает инфракрасный сигнал.
Ответ: Возможно, батарея в роботе установлена не правильно, проверьте расположение и затяните винт. Так же проверьте, подключен ли разъем питания. В случае, если после этих действий ситуация не изменилась, пожалуйста, свяжитесь с сервисным центром.
Ответ: Если робот обнаруживает слишком большое количество грязи в определенном месте, он автоматически замедляет ход и начинает двигаться по веерообразной или спиралевидной траектории.
Ответ: Нет, при соприкосновении с препятствием робот автоматически меняет направление, а специальный резиновый бампер защищает от поломок и царапин.
Ответ: Во время работы робот издает небольшой шум, поэтому лучше всего понаблюдать за реакцией животных при первом использовании робота.
Ответ: Робот эффективно чистик ковровые покрытия с ворсом длиной менее 2 см. Пожалуйста, помогите роботу обойти края ковра.
Ответ: Да. Робот автоматически переходит в экономный режим питания послеполной зарядки.
Ответ: В автоматическом режиме и в режиме «следование по стене» робот автоматически идентифицирует стену и эффективно чистит углы боковыми щетками.
Угловые пересечения двух стен могут быть не прочищены, возможно Вам необходимо будет прочистить их вручную.
Ответ: В случае возникновения препятствия на пути следования, робот автоматически разворачивается и ищет другие маршруты.
Ответ: Нет. Максимальное напряжение устройства составляет 24 В, что является безопасным напряжением.
Купить робот-пылесос Good Robot по лучшей цене >>