Рейтинг: 4.0/5.0 (1835 проголосовавших)
Рейтинг: 4.0/5.0 (1835 проголосовавших)Категория: Инструкции
12.29. Высотные костыли закрепляются не реже чем через 5 м и определяются по высоте с точностью. 5 мм. Использование в качестве исходного одного репера не допускается.
12.30. На криволинейных участках сооружений продольная ось закрепляется системой хорд или секущих (рис. 12.10). Отклонения (стрелы прогиба) заданных хорд или секущих от криволинейной оси могут не учитываться, если они не превышают:
5 см - для горных выработок;
2 см - для бетонных работ и для укладки сборных конструкций.
Рис. 12.10. Разбивка продольной оси выработки:
а - способом хорд и б - способом секущих
12.31. Разбивка околоствольных сооружений (насосная камера, склад взрывматермалов и др.) производится упрощенными способами, с применением графических построений и так называемого «египетского треугольника» (стороны которого кратны числам 3, 4, 5). Такие же способы применяются при разбивке вспомогательных (притоннельных) выработок на основной трассе.
Г. Разбивки и съемки при проходке штолен
12.32. В тоннелестроении осуществляется проходка штолен различного назначения: подходных, передовых, вентиляционных, дренажных, верхних и др. с деревянной или металлической крепью.
12.33. Основными маркшейдерскими работами при проходке штолен являются разбивка оси штольни в плане и ведение её по высоте. Все разбивочные работы производятся в соответствии с указаниями раздела В настоящей главы.
12.34. Рекомендуется применять для обслуживания штольневой проходки световые сигналы, вертикальные прорези которых фиксируют продольную ось, а горизонтальные - высотную отметку, с учетом проектного уклона (см. пп. 15.11 и 15.22).
12.35. При проходке на криволинейном участке штольни первоначальная разбивка очередной хорды (секущей) выполняется при подходе забоя к концу хорды путем смещения осевых отвесов предыдущей хорды на створ новой (рис. 12.11). Окончательная разбивка выполняется инструментально, полярным способом.
Рис. 12.11. Разбивка направления новой секущей в забое:
1 - осевые отвесы; 2 - точка попорота
12.36. При проходке передовых штолен по трассе на участке переходной кривой пользуются линией тангенса, от которой откладываются ординаты, определяющие положение оси в натуре (см. рис. 14.6).
На второй части переходной кривой целесообразно пользоваться смещенной линией тангенса.
При значительной длине переходных кривых в железнодорожных тоннелях для разбивки оси следует пользоваться одной или несколькими хордами, для которых рассчитываются стрелы прогиба (см. раздел Д главы II).
12.37. Если к точности проходки штольни не предъявляется повышенных требований, возможно переходную кривую заменить системой секущих (иногда неравной длины), разбивку которых производят в соответствии с указаниями п. 12.35.
12.38. Отклонения рам штольневого крепления в плане (от оси), в профиле и по пикетажу не должны превышать ? 5 см. Рамы должны устанавливаться нормально к оси; для криволинейных участков это требование означает, что плоскость рамы должна быть направлена по радиусу кривой.
12.39. При проходке штолен в скальных породах без крепления или с анкерной крепью в стенах забуриваются шпуры через 5 - 10 м на заданном горизонте. В шпуры забиваются деревянные пробки, на которых фиксируются точки (маркшейдерские гвозди) по пикетажу, высоте и смещению от оси. Все эти данные записываются в табличках, закрепленных на пробках.
12.40. В штольнях с применением электровозной откатки на верхняках рам закрепляется смещенная ось на безопасном для работы расстоянии от контактного провода.
12.41. В процессе проходки штольни должна производиться маркшейдерская съемка устанавливаемой крепи и разработанных профилей породы. Данные съемки фиксируются в маркшейдерской книге и заносятся на рабочие планы.
МАРКШЕЙДЕРСКИЕ РАБОТЫ ПРИ СТРОИТЕЛЬСТВЕ ПОДЗЕМНЫХ СООРУЖЕНИЙ ГОРНЫМ СПОСОБОМ С МОНОЛИТНОЙ ОБДЕЛКОЙ
А. Передача осей и отметок с одного горизонта на другой
13.01. Все разбивочные работы при строительстве подземных сооружений горным способом с монолитной обделкой базируются на подземной полигонометрии и высотной основе, закрепляемой в нижней или верхней штольнях (в зависимости от принятой организации работ). Применяя способы проходки с раскрытием на полный профиль, знаки подъемной маркшейдерской основы закрепляют в подошве или стенах сооружения, при небольших сечениях тоннеля - в своде.
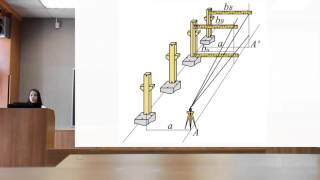
13.02. Когда имеется нижняя штольня, прокладка полигонометрии в верхней штольне необязательна. Перенос оси сооружения на верхний горизонт (верхнюю штольню) осуществляется инструментально от знаков полигонометрии нижней штольни через вертикальные сбойки (фурнели) с помощью створа двух отвесов. По мере появления новых фурнелей ось должна корректироваться дополнительными отвесами (рис. 13.1).
Рис. 13.1. Передача направления и отметок в верхний горизонт выработок:
1 - створные отвесы нижнего горизонта; 2 - отвесы для передачи направления; 3 - створные отвесы верхнего горизонта; 4 - репер нижнего горизонта; 5 - высотный костыль верхнего горизонта; 6 - нивелирные рейки; 7 - рулетка; 8 - нивелиры
13.03. Определение отметок временных реперов в верхней штольне производится нивелированием с помощью стальной рулетки, опущенной через вертикальную сбойку (см. рис. 13.1).
13.04. При проходке вертикальной выработки (фурнели) в крепление забивается костыль и указывается расстояние от него до верха разработки.
13.05. На стойках рам верхней штольни с обеих сторон закрепляются высотные костыли для обеспечения проходки ее и разработки калотт в профиле. Отметки указанных костылей определяются инструментально не менее чем с двух исходных реперов.
Б. Разбивки и съемки при разработке калотт, установке кружал и бетонировании сводов
13.06. До начала разработки калотт назначается пикетаж начала и конца каждой калотты с присвоением ей соответствующего порядкового номера. Составляется схема расположения лонгарин калотты и проектных расстояний до них от оси и высотных костылей, а также паспорт крепления кружал, утверждаемый руководством строительства.
13.07. При разработке калотты в ней закрепляются продольная ось, линия горизонта и нормаль к оси. На основе этих данных в соответствии с проектной схемой производится разработка грунта и установка крепления. Перед производством разбивок для установки кружал ось и высотные отметки должны быть повторно проверены от нижнего горизонта.
13.08. На криволинейных участках трассы в калотте закрепляется ломаная линия, отклонения которой от проектной кривой не должны превышать. 2 см. Для этой цели осевые гвозди на верхняках рам верхней штольни, выставленные по хорде или секущей, смещаются на величины стрел прогиба, рассчитываемые в соответствии с пикетажем точек. Предварительно продольная ось проверяется от нижнего горизонта; все старые гвозди уничтожаются.
13.09. Установка креплений в калоттах на прямых участках сооружения производится перпендикулярно его продольной оси; на криволинейных участках - нормально к оси, т.е. по направлению радиуса кривой.
Рис. 13.2. Схема разбивки для установки кружал:
R - радиус кружала; h - расстояние от центра кружала (о) до пяты свода (к); 1 - высотный костыль; 2 - штендеры; 3 - линия вспомогательного горизонта; 4 - маркшейдерский гвоздь; 5 - затяжка; 6 - филата; 7 - марчеваны; 8 - верхняк; 9 - клинья; 10 - уровень верха кружал; 11 - рашпаны; 12 - лонгарины; 13 - кружало; 14 - лежаны; 15 - проектный контур обделки тоннеля; 16 - пята свода
13.10. После окончания разработки калотты производится съемка поперечных сечений через 2 - 3 м по пикетажу, от закрепленной продольной оси и высотных костылей.
Съемка разработанного профиля поперечного сечения может осуществляться также от кружал радиальными промерами (см. рис. 13.4).
13.11. Для установки кружал по обе стороны калотты закрепляются высотные костыли и отвесы, фиксирующие обрезы кружал (рис. 13.2).
13.12. Изготовление кружал и лекал для бетонирования производится на специальном полке (бойке) с точностью ? 1 см. На кружалах наносятся осевые нарезки и линия высотных костылей, являющихся исходными для установки кружал (рис. 13.3).
Рис. 13.3. Разбивка кружал трехрадиусного очертания
Рис. 13.4. Проверка установки кружал и съемка контура выработки:
1 - кружало; 2 - унтерцуги;. где h задается в наиболее удобном для измерений месте.
13.13. Установка пят кружал от продольной оси и верха кружал по высоте производится с точностью. 2 см. Проверка правильности кривизны установленного кружала осуществляется промером от оси на промежуточных уровнях (рис. 13.4). Эту проверку можно осуществлять также от хорды сравнением фактических и проектных стрел прогиба. Общая погрешность в установке кружал не должна превышать 4 - 3 см. Величина строительного подъема кружал устанавливается равной толщине опалубки; при значительном горном давлении подъем может быть увеличен.
13.14. Установка кружал для бетонирования сводов на прямых участках осуществляется перпендикулярно продольной оси сооружения, на криволинейных участках - нормально к оси.
13.15. По разбивочным данным определяются только крайние кружала, а промежуточные устанавливаются по шнуру между крайними, уже закрепленными кружалами.
13.16. Проверка и приемка к бетонированию установленных кружал производится только в том случае, если крепление их выполнено в строгом соответствии с паспортом крепления (см. п. 13.06). Уменьшение проектной толщины конструкции не разрешается.
13.17. При бетонировании сводов сооружений определяется пикетаж начала и конца укладываемого бетона с точностью ? 5 см.
13.18. В процессе забивки бетоном замковой части свода на опалубку рекомендуется устанавливать деревянные пробки или скобы для последующего закрепления в них осевых точек.
13.19. Бетонирование сводовой части обделок подземных сооружений может также осуществляться с помощью металлических механизированных опалубок секционного (шарнирноскладывающегося) и сегментного (тюбингового) видов. Один из видов такого рода опалубок показан на рис. 13.5.
13.20. До монтажа опалубки под бетонирование производится укладка рельсов перестановщика с точностыо ? 5 см в плане и бетонирование лент (фундаментов) для установки опорных тюбингов металлической опалубки. Укладка рельсов по высоте определяется запасом «хода руки» перестановщика. Бетонирование лент производится с точностью от 0 до минус 3 см (относительно проектных отметок).
13.21. Установка опорных тюбингов первого кольца производится в плане и по высоте с точностью ? 5 мм.
13.22. Отклонения геометрических элементов смонтированного первого кольца чугунной тюбинговой опалубки должны быть не более:
отклонение опорных тюбингов в плане. ? 10 мм
горизонтальная эллиптичность. ± 25 »
отклонение опорных тюбингов по высоте. ± 10 »
отклонение свода по высоте. ? 25 »
горизонтальное опережение. ? 10 »
вертикальное опережение. ? 10 »
13.23. Все последующие смонтированные тюбинговые кольца для бетонирования должны иметь отклонения от проекта не более:
отклонение в плане. ? 25 мм
горизонтальная эллиптичность. ± 25 »
отклонение свода по высоте. ? 30 »
горизонтальное опережение. ? 30 »
вертикальное опережение. ? 30 »
13.24. Крепление установленных тюбинговых колец опалубки для бетонирования должно производиться в соответствии с утвержденным паспортом крепления.
Рис. 13.5. Тюбинговая металлическая опалубка. Тюбинги:
О - опорный; Н - нормальный; С - смежный; К - ключевой (замковый); 1 - точки 2, 4 и 2?, 4. - установочные, контрольные; 2 - бетонная опорная лента; 3 - проектная подошва верхнего уступа
13.25. От установленных колец опалубки осуществляется профилировка выработки по всему периметру.
После снятия опалубки производится съемка поперечных сечений сооружения в соответствии с п. 13.10.
В. Разбивки и съемки при бетонировании стен, лотка и железобетонной рубашки
13.26. Для разбивок, связанных с разработкой и бетонированием стен, выносится предварительно инструментом продольная ось, закрепляемая в забетонированном своде.
В местах, где закрепление и пользование осью в своде затруднено, разрешается разбивка смещенной оси. Одновременно закрепляются высотные отметки, служащие для разработки породы и установки лекал.
Рис. 13.6. Установка лекал и съемка штроссы
13.27. Разработанные штроссы должны профилироваться не реже чем через 3 м. Съемка профиля выработки может быть произведена также и от установленных лекал (см. выше рис. 13.6). По разбивочным данным устанавливаются крайние лекала в штроссе, а промежуточные - по шнуру, закрепляемому на крайних лекалах. Для установки лекал по высоте при их изготовлении делается высотная нарезка (например, +1,0 м от уровня верха лотка).
13.28. Бетонирование стен может быть разрешено при соблюдении следующих условий:
а) порода разработана в соответствии с проектным контуром. Недобор в сторону уменьшения толщины конструкции не разрешается;
б) верхние концы лекал плотно сопрягаются через опалубку с бетоном пяты свода и надежно раскреплены;
в) нижние концы лекал установлены по рассчитанному расстоянию от оси и на соответствующей этому расстоянию отметке (рис. 13.6).
13.29. Для разработки и установки лекал лотка на бетонные стены выносятся высотные отметки, закрепляемые чертой, под которой масляной краской оформляется треугольник со сторонами 3 - 5 см. В случае неудобства пользования осью тоннеля закрепляется смещенная ось. Работы ведутся в соответствии с проектной схемой.
Рис. 13.7. Съемка поперечного сечения:
а - от центра тоннеля; б - от базиса
13.30. По мере окончания бетонирования всей конструкции производится съемка поперечных сечений одним из следующих способов:
а) измерением восьми радиусов от закрепленной в тоннеле линии центров (рис. 13.7, а) - для сооружений кругового очертания;















ГЕОДЕЗИЧЕСКИЕ РАЗБИВОЧНЫЕ работы
Инженерная геодезия. Геодезические разбивочные работы /Учеб. пособие/ Е.Б. Михаленко, Н.Д. Беляев, В.В. Вилькевич, Н.Н. Загрядская, А.А. Смирнов. СПб. Изд-во СПбГПУ, 2004. 52 с.
Пособие соответствует государственному образовательному стандарту подготовки дипломированных специалистов-инженеров по направлению 653500 «Строительство».
Изложены основные сведения по содержанию, методике и технике геодезических работ, выполняемых при строительстве сооружений. Главное внимание уделено организации разбивочных работ.
Предназначено для студентов инженерно-строительного факультета всех специальностей в пределах программы бакалавриата.
Ил. 41. Библиогр. 4 назв.
Печатается по решению редакционно-издательского совета Санкт-Петербургского государственного политехнического университета.
политехнический университет, 2004
Пособие по курсу «Инженерная геодезия» предназначено для студентов инженерно-строительного факультета и посвящено геодезическому обеспечению строительства сооружений.
Рассмотрены основные методы разбивочных работ, применяемые при строительстве, в частности определение на местности положения основных осей и границ сооружений и других характерных точек в соответствии с проектом при подготовительных работах и в процессе строительства.
Описанные в пособии методы используются при строительстве и эксплуатации гидротехнических сооружений, а также других объектов промышленного и гражданского строительства.
ГЕОДЕЗИЧЕСКИЕ РАЗБИВОЧНЫЕ РАБОТЫ
1. Строительная сетка
Геодезические работы при строительстве начинаются с создания геодезической разбивочной основы, обеспечивающей выполнение последующих построений и измерений в ходе строительства с необходимой точностью и с минимальными трудозатратами. Виды разбивочных сетей, основные методы и схемы их построения рассмотрены ниже.
Строительство любого сооружения сопровождается большим объемом геодезических построений и измерений. Для их обеспечения создается специальная геодезическая разбивочная основа, состоящая из разбивочной сети строительной площадки, а также внешней и внутренней разбивочной сети сооружения. Такая структура геодезической разбивочной основы наиболее полно отвечает требованиям достижения необходимой точности построений при минимальных затратах времени. Одновременно создаются условия для выполнения построений простейшими методами и с привлечением ограниченного числа геодезических приборов.
К геодезическим разбивочным сетям относят разбивочную сеть строительной площадки и внешнюю разбивочную сеть сооружения.
Разбивочная сеть строительной площадки используется для создания разбивочных сетей сооружения, выноса в натуру осей зданий, дорог, инженерных сетей и обеспечения исполнительных съемок. Плановые сети строительной площадки создаются в виде строительной сетки (рис. 1,а ), красных и других линий регулирования застройки (рис. 1,б ), центральных систем (рис. 1,в ) и других видов сетей. Выбор вида разбивочной сети зависит от формы возводимых сооружений, их размещения, условий видимости и т.п. Стороны сети стремятся размещать параллельно осям сооружений. На больших строительных площадках, как правило, создается строительная сетка, состоящая из квадратов с размерами сторон 20, 50, 100 и 200 м.
Пункты нивелирной сети строительной площадки обычно совмещают с пунктами плановой разбивочной сети. Высоты пунктов сети определяют проложением нивелирных ходов, опирающихся не менее чем на два репера государственной высотной геодезической сети.
Требования к точности построения разбивочной сети строительной площадки приведены в табл. 1.
Характеристика объектов строительства

Рис. 1. Схема разбивочной сети строительной площадки
Внешняя разбивочная сеть сооружения создается дня перенесения в натуру и закрепления проектных размеров сооружения, производства детальных разбивочных работ и исполнительных съемок.
Внешняя разбивочная сеть сооружения проектируется в виде сети пунктов (осевых знаков), закрепляющих на местности главные оси сооружения (рис. 2,а ) или основные оси сооружения. При строительстве сложных объектов и зданий выше девяти этажей дополнительными пунктами закрепляются углы здания, образованные пересечениями основных разбивочных осей (рис. 2,б) Высотной основой внешней разбивочной сети сооружения служат реперы, совмещенные с плановыми пунктами (осевыми знаками).

Рис. 2. Схема внешней разбивочной сети зданий:
Внутренняя разбивочная сеть сооружения предназначается для обеспечения построений непосредственно на монтажном горизонте, поэтому в ходе строительства с возведением нового монтажного горизонта она должна строиться заново.
Внутренняя разбивочная сеть сооружения создается в виде сети пунктов (осевых знаков), закрепляющих на исходном и монтажных горизонтах главные и основные оси сооружения (рис. 3).
На исходном горизонте внутренняя разбивочная сеть сооружения создается от пунктов внешней разбивочной сети сооружения, а на монтажных горизонтах – от пунктов внутренней разбивочной сети исходного горизонта методами наклонного или вертикального проектирования.

Рис. 3. Схема внутренней разбивочной сети здания
Точность построения внешней и внутренней разбивочных сетей сооружения и разбивочных работ в процессе строительства приведена в табл. 2.
Характеристика зданий, сооружений,
Сохранность и устойчивость знаков геодезической разбивочной основы проверяются не реже двух раз в год в процессе строительства от пунктов триангуляции и полигонометрии 1-4-го классов и 1-2-го разрядов.
При строительстве крупных объектов в качестве плановой разбивочной сети строительной площадки обычно применяется строительная сетка. Учитывая, что строительная сетка оказывает влияние на выбор методов разбивочных работ, рассмотрим вначале особенности ее создания и применения.
Строительная сетка на местности создается в виде системы квадратов или прямоугольников, ориентированных параллельно осям сооружений (рис. 4). В зависимости от характера строящихся объектов длина стороны квадратов или прямоугольников может составлять от 20 до 200 м.

Рис. 4. Строительная сетка
Для удобства пользования строительная сетка создается в условной системе координат. Начало системы координат выбирают так, чтобы все пункты имели положительные координаты, для этого начало координат совмещают с пунктом, расположенным в юго-западной вершине строительной сетки. Ось абсцисс обычно условно обозначают буквой А, а ось ординат буквойВ. В соответствии с этим линиям строительной сетки присваивают порядковую нумерацию (1А. 2А. 1В. 2В. ). Обозначения пунктов сети содержат информацию об их координатах. Так, пункту 2А 3В соответствуют координатыА = 200 м иВ = 300 м. По этому же правилу координаты точкиМ (А = 157,01 м;В = 345,96 м) записываются в виде 1А + 57,01; 3В + 45,96.
Работы по созданию строительной сетки включают в себя проектирование, предварительную разбивку, определение фактических координат центров пунктов и редуцирование (перемещение) пунктов в их проектное положение.
Проектирование строительной сетки выполняют обычно на стройгенплане, на котором нанесены не только постоянные, но и временные сооружения. Вначале строительную сетку чертят на кальке и накладывают на стройгенплан. Кальку размещают, чтобы направления осей строительной сетки были параллельны осям сооружений, а линии сетки не проходили через проектируемые и существующие сооружения. Так как в последующем вершины квадратов (прямоугольников) должны надежно закрепляться постоянными знаками, то последние должны быть удалены от бровки котлованов на расстояния, превышающие двойную глубину котлована. При невозможности соблюдения этих требований разрешается производить параллельные смещения отдельных линий сетки. Затем вершины строительной сетки перекалывают на стройгенплан и определяют координаты пунктов сети и координаты точек сооружений. Переход от плоских прямоугольных координат Гаусса (X ,Y ) к условной системе координат (А, В ) и наоборот осуществляют по формулам:
где X0. Y0 – плоские прямоугольные координаты Гаусса начала условной системы координат (снимают со стройгенплана графически); – дирекционный угол направления оси А в системе координат X. Y (вычисляют по прямоугольным координатам двух пунктов строительной сетки).
Предварительную разбивку начинают с выноса в натуру трех точек оси (стороны) строительной сетки, например O. М и N (рис. 5). Необходимые разбивочные угловые и линейные размеры вычисляют по координатам ближайших геодезических пунктов и пунктов сетки. На рис. 5 три точки оси вынесены методом прямой засечки по отложенным горизонтальным углам и . Створность точек O, М и N проверяют теодолитом и при обнаружении нестворности их перемещают. Затем от точки O. принятой за начальную, путем линейных построений разбивают все другие точки стороны ON.

Рис. 5. Предварительная разбивка строительной сетки
Вторую ось (ОК ) разбивают с точкиO построением прямого угла теодолитом, положение остальных точек осиOK находят из линейных измерений.
Положение всех других точек сетки определяют построением перпендикуляров из точек разбитых осей ON иOK (рис. 5).
Предварительную разбивку завершают закреплением точек сетки временными знаками (деревянными столбами) или сразу постоянными знаками. В качестве постоянных знаков используют железобетонные монолиты или трубы с приваренной к ним сверху горизонтальной плитой размерами порядка 20?20 см.
Действительные координаты предварительно разбитых пунктов строительной сетки определяют методом триангуляции, литерангуляции (измеряются углы и стороны в фигурах сети), полигонометрии или с помощью геодезических засечек. Выбор метода зависит от размеров строительной площадки, рельефа местности, наличия геодезических приборов и других условий. Углы измеряет теодолитами Т2 и Т5, а длины линий – электронно-оптическими дальномерами. Точность измерений для построения строительной сетки подбирается по характеристике объектов строительства (см. табл. 1).
Действительные координаты пунктов сети получают в результате уравнительных вычислений. Полученные координаты пунктов сравнивают с их проектными значениями, и если они не совпадают, то выполняют редуцирование центров пунктов сети. На плите постоянного знака центр пункта перемещают по величинам разностей координат A и B в проектное положение и закрепляют путем кернения.
Работы по созданию строительной сетки и других разбивочных сетей должны быть завершены заказчиком не менее чем за 10 дней до начала строительства и переданы по акту подрядчику.
2. СОДЕРЖАНИЕ И ОСНОВНЫЕ ЭТАПЫ ВЫПОЛНЕНИЯ ГЕОДЕЗИЧЕСКИХ РАЗБИВОЧНЫХ РАБОТ
Геодезические работы, выполняемые с целью перенесения в натуру запроектированных сооружений, называются разбивочными работами. Практически эти работы сводятся к выносу и закреплению на местности отдельных точек, осей и отметок, определяющих проектные положения частей и конструктивных элементов сооружения. Принята строгая последовательность выполнения разбивочных работ, вытекающая из основного принципа геодезии «от общего к частному». Вначале определяют от пунктов разбивочной сети строительной площадки положение на местности главных (основных) разбивочных осей и закрепляют их пунктами внешней разбивочной сети сооружения. Затем создают внутреннюю разбивочную сеть сооружения в виде пунктов, закрепляющих на исходном и других монтажных горизонтах главные (основные) оси. И только после этого приступают к детальным разбивочным работам, предшествующим всем этапам возведения сооружения.
Главные оси (оси симметрии сооружения) выносят в тех случаях, когда сооружение имеет сложную конфигурацию или большие размеры, а также когда группа сооружений объекта имеет технологические связи.
При строительстве небольших сооружений выносят и закрепляют основные разбивочные оси (линии, определяющие контур наружных стен сооружения в плане). В этом случае вначале от ближайших пунктов разбивочной сети строительной площадки выносят две крайние точки, определяющие положение оси длинной стороны сооружения. Поперечные оси разбивают с ранее вынесенных точек оси путем построения прямых углов. Разбивочные работы контролируют промерами до пунктов разбивочной сети строительной площадки, не применявшихся при перенесении в натуру данной оси.
Вынос точек и осей производится промерами по сторонам строительной сетки способами полярных и прямоугольных координат, линейных и угловых засечек и т.д. Примеры разбивки главных осей промерами по сторонам строительной сетки и основной оси полярным способом показаны на рис. 6,а и 6,б соответственно.

Рис. 6. Разбивка осей сооружения
Главные и основные оси сооружений являются основой для детальных разбивочных работ, в процессе которых на монтажных горизонтах выносятся внутренние, монтажные и установочные оси.
Внутренними осями являются проектные оси конструктивных элементов сооружений. Монтажными называют оси, параллельные внутренним осям и смещенные в сторону от них для удобства выполнения строительно-монтажных работ. Установочными осями являются оси симметрии монтируемых конструктивных элементов и оборудования.
Основными элементами (видами) геодезических разбивочных работ являются:
построение на местности проектных углов;
построение на местности линий заданной длины;
построение на местности линий (осей) в заданном направлении;
вынос в натуру точек с заданными координатами и отметками;
построение на местности линий и плоскостей с проектными уклонами.
Исходными данными для разбивочных работ служат генеральный план строительной площадки и разбивочные чертежи.

Рис. 7. Разбивочный чертеж
По генеральному плану, содержащему пункты разбивочной сети строительной площадки, проектируемые и существующие сооружения, местные предметы и рельеф, намечают способы разбивочных работ и определяют необходимые для их осуществления основные и контрольные разбивочные размеры (углы, расстояния, превышения, уклоны). После уточнения на местности способов разбивочных работ по проектным координатам и высотам точек (взаимному расположению конструктивных элементов) вычисляют точные значения разбивочных размеров и составляют разбивочные чертежи – схемы выполнения разбивочных работ (рис. 7).
3. ПОДГОТОВКА ДАННЫХ ДЛЯ РАЗБИВОЧНЫХ РАБОТ
Методика подготовки данных для разбивочных работ и точность перенесения сооружений в натуру зависят в известной мере от метода проектирования. Однако, во всех методах в той или иной мере присутствуют три способа подготовки данных для разбивочных работ: графический, аналитический и графоаналитический.
В графическом способе все сооружения размещают на генплане при помощи чертежных принадлежностей. В этом случае для получения разбивочных размеров координаты выносимых точек сооружений также снимают графически от пунктов строительной сетки на стройгенплане и по ним затем вычисляют углы и расстояния. Реже непосредственно измеряют длины линий с помощью циркуля-измерителя и масштабной линейки, а углы – с помощью транспортира. Погрешность перенесения проекта в натуру при графическом способе зависит от масштаба плана и точности измерений, обычно принимаемой 0,2 мм, т.е. = 0,2М мм, где М – знаменатель численного масштаба плана.
Вследствие невысокой точности графический способ подготовки данных используется в случае, когда сооружения не связаны технологически или единым архитектурным замыслом, например при внутриквартальной застройке, возведении отдельно стоящих сооружений.
В аналитическом способе все точки проекта задаются координатами, поэтому данные для разбивочных работ могут вычисляться с любой заданной точностью вне зависимости от масштаба генплана.
Аналитический способ подготовки данных трудоемок, в связи с этим на практике чаще пользуются комбинированным графоаналитическим способом, когда координаты точек задаются графически, а все остальные данные получают расчетным путем.
Рассмотрим последовательность вычисления углов и расстояний, используемых для плановой разбивки сооружений. Чтобы вынести полярным способом точку М (рис. 7), координатыАМ ,ВМ которой заданы или сняты графически от ближайшего пункта 4А 3B. необходимо вычислить расстояние от этого пункта до точкиМ и значение горизонтального угла между линией строительной сетки и направлением на точкуМ. В рассматриваемом случае значение этого угла равно значению дирекционного угла направления на точкуМ. По формулам обратной геодезической задачи находим:
где 300 и 400 – координаты пункта 4А 3B. м.
При графоаналитическом способе возникают случаи, когда в процессе подготовки данных вычисляют координаты отдельных точек проекта и только после этого – разбивочные размеры ( , d ). Например, если заданы координаты угла первого сооружения и дирекционный угол линии (1-2) застройки (рис. 8), то для выноса сооружений способом проектного полигона вначале вычисляют координаты точки 2 по формулам прямой геодезической задачи
затем по формулам обратной геодезической задачи находят дирекционные углы и длины других сторон полигона (кроме уже известной 1-2)

Рис. 8. Способ проектного полигона
Значения горизонтальных углов вычисляют по разности дирекционных углов направлений, составляющих данный угол. Например,
Высоты точек проекта задаются, как правило, аналитически. Поэтому определение превышения сводится к вычислению разностей отметок проектной точки и пункта разбивочной сети (репера):
Вычисленные разбивочные размеры, используемые для построений и контрольных измерений, записывают на разбивочных чертежах. Предварительно на разбивочный чертеж переносят с генплана выносимые точки и оси сооружения, а также пункты разбивочной сети, от которых осуществляются построения и контрольные измерения.
Рекомендуемые способы разбивки, перечень геодезических приборов, точность разбивочных работ и условия обеспечения точности измерений указывают также на разбивочном чертеже или в пояснительной записке (см. табл. 2).
4. ОСНОВНЫЕ ЭЛЕМЕНТЫ ПЛАНОВЫХ РАЗБИВОЧНЫХ РАБОТ
Основными элементами плановых разбивочных работ, содержащимися в различных комбинациях в отдельных способах выноса в натуру сооружений, являются: построение линий и углов заданных размеров, построение линий (осей) в заданном направлении.
4.6.1. Перед устройством дорожной одежды производится контроль правильности фактического размещения корыта на каждом проектом участке в плане и профиле. Контроль ведут вешением створов вдоль проектных бровок и кромок земляного полотна и нивелированием поверхности корыта. В результате контроля устанавливают соответствие на местности проектного поперечного профиля и фактической поверхности основания корыта. Об этом свидетельствует акт приемки скрытых работ.
4.6.2. Разбивка основания и покрытия проезжей части дороги начинается с расстановки маяков (колышков), являющихся ориентирами. На них указывается толщина каждого конструктивного слоя основания и покрытия.
4.6.3. Разбивка маяков производится в пределах однородного участка на каждом поперечном профиле. Эти участки отстоят друг от друга не более чем на 60-70 м.
4.6.4. По обе стороны от оси дороги откладывают половину ширины проезжей части и за кромкой корыта по нивелиру забивают маяки (колышки) на уровне дна корыта, отдельных слоев основания и верха дорожной одежды. Промежуточные точки для геодезического управления работой машин устанавливаются с помощью визирного луча геодезического прибора или визирок.
4.6.5. Колышки-маяки устанавливают на обочинах на расстоянии, обеспечивающем сохранность их до окончания работ по устройству дорожной одежды.
4.6.6. При разбивке лотков проезжей части учитывают изменение их продольного и поперечного уклонов относительно запроектированного уклона оси дороги или относительно уклона верха ограничительного борта.
4.7.1. Разбивка уширений и виражей на сложных участках должна быть взаимно увязана. Длины отгонов виражей и отводов уширений должны быть равны длинам переходных кривых; уклон виража должен быть не меньше уклона поперечного профиля покрытия, но не более 0.04 на дорогах, где случается гололед; предельный; уклон виража не должен быть больше 0,10. Уклоны обочин на вираже должны быть равны уклону виража.
4.7.2. Уширение проезжей части дороги производится путем увеличения внутренней ее половины вначале за счет обочины внутренней, а затем внешней, но не более чем на 0,5 м при условии сохранения ширины внутренней обочины не менее чем 1,5 м для дорог I и II категории и 1 м - для дорог других категорий. Если предусмотрены уширения больше указанных, то дальнейшее увеличение производят путем уширения земляного полотна в сторону внутренней обочины. Отвод уширения производится постепенно на длине переходной кривой.
4.7.3. Разбивка переходных кривых, уширений и виражей производится по заранее составленным рабочим разбивочным чертежам (рис. 4.18). Разбивочный чертеж состоит из плана, разбивки переходной кривой, продольного и поперечных профилей разбивки, дополнительных уклонов на отгоне виража и отдельных перемещений характерных точек поперечника.
4.7.4. При устройстве уширений и виражей должна быть обеспечена сохранность высот точек внутренней бровки земляного полотна. Высотное положение всех точек поперечного профиля при этом устанавливается по их превышениям над внутренней бровкой полотна в соответствии с положением поперечного профиля на участке виража и его отгона.
4.7.5. Отгон виража ведется на участке переходной кривой вначале вращением внешней половины дорожного полотна относительно оси дороги, а затем по достижении ею поперечного односкатного профиля со стандартным поперечным уклоном - вращением всего профиля земляного полотна относительно его внутренней бровки.
4.7.6. Перевод поперечного уклона внешней обочины до значения поперечного уклона проезжей части производят постепенно до начала отгона виража на прямолинейном, участке на протяжении 10 м, допуская изменение продольного уклона бровок земляного полотна равным дополнительному уклону отгона виража.
4.7.7. Разбивка переходных и круговых кривых на многополосных дорогах большой ширины может выполняться по крайним линиям дорожного полотна, где фиксируется их положение. При разбивке следует учитывать изменение радиусов кривых из-за несовпадения линии разбивки по поперечному профилю с осью проезжей части дороги.

Рис. 4.18. Разбивочный чертеж автомобильной дороги с данными для разбивки:
а - рабочий план и поперечные профили; б - продольный профиль отгона виража; 1 - бровка; 2 - внутренняя кромка; 3 - внешняя кромка
4.7.8. Сгущение в плане и профиле всех точек в пределах виража и участков его отгона, а также на участках уширения и его отвода может выполняться обычной линейной интерполяцией с учетом формы кривизны линии данного участка.
4.7.9. Разбивка сложных закруглений с устройством виража производится в два этапа: вначале в плане, а затем в профиле в соответствии с установленными интервалами разбивки.
На участке отгона виража вначале разбивают переходную кривую; затем на каждом поперечнике (вдоль нормали к кривой) определяют положение всех бровок и кромок дорожного полотна в плане; рассчитывают отметки внутренней бровки дорожною полотна с учетом вертикальной кривой, превышений точек поперечников дорожного полотна на отгоне виража и на вираже над внутренней кромкой полотна.

Рис. 4.19. Разбивка серпантин
4.8.1. Разбивку серпантин на автомобильных дорогах выполняют в два приема, определяя вначале положение всех вершин и главных точек кривых (точки А, В, С,D, Е, F, G, H и K ), а затем детально каждую кривую (рис. 4.19).
Исходными данными для разбивки серпантин являются: угол поворота трассы а; положение центра кривой О на трассе; радиус основной кривой r, радиусы сопрягающих кривых R1 и R2. В частном случае при симметричной серпантине R1 = R2 и С1 =С2. Углы поворотов сопрягающих кривых ?1 и ?2 определяют но теореме синусов из треугольников BDO и HFO .
4.8.2. Для разбивки серпантин рекомендуется пользоваться одним из ранее указанных способов разбивки кривых, а расчеты вести на микрокалькуляторах или пользоваться таблицами кривых.
4.8.3. При разбивке круговой кривой, расположенной между переходными кривыми, необходимо в ординаты при детальной разбивке способом прямоугольных координат вносить поправку на величину сдвижки этой кривой, возникающей вследствие прилегающей к ней переходной кривой. Поправка вводится во внутреннюю сторону относительно расположения кривой.
5.1.1. Детальная разбивка каждой кривой дорожного закругления выполняется после разбивки трассы. Разбивку круговых кривых ведут от их конечных точек (начала или конца кривой) к середине кривой. Переходные кривые (клотондные и др.) разбивают от точки начала кривой к ее середине.
5.1.2. Детальную разбивку кривых можно выполнять любым способом, обеспечивающим необходимую точность.
5.1.3. Перед разбивкой кривой назначают, находят или рассчитывают все исходные данные для разбивочных работ, составляют разбивочный чертеж и таблицу разбивки.
5.1.4. При разбивке каждого криволинейного участка автомобильной дороги сначала (в соответствии с интервалом разбивки) устанавливают положение всех точек на кривой, размещенных по оси дороги (вдоль трассы). В полученных точках находят направления нормалей к кривой, а затем от оси дороги вдоль каждой нормали устанавливают положение всех точек поперечного профиля дорожного полотна в данном месте.
5.1.5. При детальной разбивке горизонтальных кривых на участках спусков и подъемов, а также на участках вертикальных кривых высотным размещением пренебрегают, учитывая его при детальной разбивке земляного полотна в продольном профиле.
5.1.6. Разбивку круговых и переходных кривых в открытой легкодоступной местности выполняют способом прямоугольных, координат, а в закрытой - способом углов и хорд. В открытой местности, где удобно использовать дальномеры, хорошие результаты дают способы полярных координат с полюсами в точках начала и конца кривой. В стесненных условиях используют способ продолженных хорд, а при малых радиусах кривых - способ полярных координат из центра круговой кривой.
5.2.1. Разбивка (рис. 5.1) производится от точки начала (конца) круговой кривой (НКК) или от точки начала переходной (клотоидной) кривой (ННК). Прямоугольные координаты точек рассчитывают на микрокалькуляторе или берут из таблиц.
5.2.2. Исходными величинами разбивки являются: Sп - длина дуги кривой до точки разбивки (Sп =К0n ); К0 - интервал расстановки точек на кривой ; n -число интервалов разбивки (порядковый номер точки разбивки на кривой); R - радиус круговой кривой; А - параметр клотоиды; ?п =SпR =K0n /R - центральный угол между радиусами кривой, проведенными из точки начала (конца) кривой и из точки разбивки; ?m =S 2 n /(2A 2 ) -угол между касательными клотоиды, проведенными в начале кривой и в точке разбивки.
5.2.3. Прямоугольные координаты точек круговой кривой устанавливают

Рис. 5.1. Схема определения положения точки на кривой способом прямоугольных координат
5.2.4. Прямоугольные координаты точек клотоидной кривой находят из зависимостей:
5.2.5. Технология разбивки следующая: отдельно для каждой точки кривой вдоль направления угла на касательной к кривой из исходной точки начала кривой (НК) откладывают значение абсциссы xп илиXп. В полученной точке эккером восстанавливают перпендикуляр и вдоль него откладывают ординату точки yн или Yн. устанавливая положение точки на кривой.
5.3.1. Разбивка (рис. 5.2) выполняется от точки начала (конца) круговой кривой или переходной (клотоидной) кривой. Расчет положения точек разбивки ведут на микрокалькуляторах или устанавливают из таблиц.
5.3.2. Исходными данными разбивки являются:
S - длина дуги кривой до точки разбивки (S =K0n ); K0 - интервал расстановки точек на кривой; n - число интервалов разбивки (порядковый номер точки разбивки на кривой); R - радиус круговой кривой (конечный радиус переходной кривой); А - параметр клотоиды; ?n =Sn /R =R0n /R - центральный угол между радиусами круговой кривой, проведенными из точек начала (конца) кривой и точкой разбивки. Тот же угол для клотоидной кривой ?n =S 2 n /(2А 2 п ).
5.3.3. Отрезки касательной ?n и нормали ?n к круговой кривой находят по формулам:
5.3.4. Отрезки касательной ?n и нормали ?n к клотоидной кривой, а также угол между касательной клотоиды, проведенной в точке начала кривой и нормалью к кривой в точке разбивки ?к устанавливают по формулам:

Рис. 5.2. Схема определения положения точки на кривой способом отрезка касательной и нормами
5.3.5. Технология разбивки следующая: для каждой точки кривой отдельно вдоль направления угла но касательной к кривой откладывают значение отрезка касательной ?п . В полученной точке ставят теодолит и откладывают от направления на начало кривой угол ?п в сторону кривой, получая направление нормали к кривой. В полученном направлении откладывают величину отрезка нормали ?n „ и находят положение точки на кривой. От найденной точки на кривой по имеющемуся направлению нормали можно одновременно разбить псе точки проектного поперечною профиля и установить точки его закрепления.
5.4.1. Разбивка (рис. 5.3) производится от точки начала (конца) круговой кривой (НК) или от точки начала переходной (клотоидной) кривой.
5.4.2. Исходными данными разбивки являются:
Sn - длина дуги от начала кривой до точки разбивки (Sn = K0n ); КK0 - интервал расстановки точек на кривой; n - число интервалов разбивки (порядковый номер точки разбивки на кривой); R - радиус круговой кривой; А - параметр клотоидной кривой; ?n - центральный угол, заключающий дугу кривой.
5.4.3. Для круговой кривой определяют величину полярного угла из точки начала полярных координат (точки НК и КК) по формуле
5.4.4. Для клотоидной кривой величину полярного угла устанавливают от точки начала кривой по формуле
Длину радиуса-вектора хорды находят из зависимости
5.4.5. Технология разбивки следующая: устанавливают теодолит в точке начала разбивки круговой кривой или клотоиды. Пулевой отсчет горизонтального круга ориентируют по направлению касательной к кривой в данной точке (вдоль направления на угол попорота) и от этого исходного направления для каждой точки откладывают величину полярного угла ?кп. а вдоль полученного направления - длину соответствующей хорды dп. Так определяют положение каждой точки на разбиваемой кривой.
5.5.1. Разбивка (рис. 5.4) ведется от точки начала (конца) круговой кривой или переходной (клотоидной) кривой.
5.5.2. Исходными данными разбивки являются:
Sn - длина дуги от начала кривой до точки разбивки (Sn =K0n ); K0 - интервал расстановки точек на кривой; n - число интервалов разбивки ( порядковый номер разбивки на кривой); R - радиус круговой кривой; А - параметр клотоидной кривой; ?n - центральный угол, заключающий дугу кривой; ?n - центральный угол, заключающий дугу одного интервала разбивки.
5.5.3. Для круговой кривой величину полярного угла из точки начала разбивки (начало кривой) определяют по формуле
Устанавливают длину хорды в пределах одного интервала разбивки
5.5.4. Для клотоидной кривой величину полярного угла, откладываемого от точки начала кривой, находят по формуле или через тангенс угла
Значение начальной хорды между смежными точками разбивки на участке (n- 1) и п устанавливается по формуле
5.5.5. Технология разбивки следующая. Установив теодолит в точке начала (конца) круговой кривой или клотоиды, нулевой отсчет горизонтального круга ориентируют по направлению касательной к кривой в данной точке (вдоль направления на угол поворота трассы), и от этого исходного направления для каждой точки внутрь кривой откладывают величины полярных углов ?кп. Одновременно от предыдущей точки разбивки (n- 1) рулеткой или лентой в сторону кривой откладывают значение начальной хорды для данного интервала разбивки. В пересечении конца начальной хорды и визирного луча закрепляют точку на кривой.

Рис. 5.3. Вид детальной разбивки горизонтальной кривой способом полярных координат

Рис. 5.4. Вид детальной разбивки горизонтальной кривой способом угловой и начальной хорды
56.1. Разбивка (рис. 5.5) производится от точки начала (конца) круговой или переходной (клотоидной) кривой.
5.6.2. Исходными данными разбивки являются:
Sп - длина дуги от начала кривой до точки разбивки(Sn =K0n ); Sп-1 - длина дуги от начала кривой до предыдущей точки [Sп-1 = K0 (п-1 )]; К0 - интервал разбивки точек на кривой; п - число интервалов разбивки (порядковый номер точки разбивки на кривой); R - радиус круговой кривой; А - параметр клотоидной кривой; ?п - центральный угол, заключающий дугу кривой; ?п,(п-1) - угол между направлением хорды п и продолжением предыдущей (п -1); d - длина хорды круговой кривой; dп,(п-1) - длина хорды между точками разбивки п и (п -1) клотоиды; а - крайнее перемещение первой хорды от касательной; bп,(п-1) - среднее перемещение между концом последующей п и продолжением предыдущей (n- 1) хорд.
5.6.3. Для круговой кривой крайнее п и среднее b перемещения хорды равны:
5.6.4. Для клотоидной кривой расчеты перемещении ведут по формулам:
5.6.5. Технология разбивки следующая. Положение первой точки на кривой находят отложением длины хорды d1 вдоль касательной от начала кривой В полученной точке ставят рулетку и, откладывая от нее внутрь кривой крайнее перемещение а. смещают на него конец хорды d1. Так получают первую точку на кривой. Далее продолжают линию в направлении первой хорды (точка начала кривой - первая точка кривой) и на ней откладывают длину второй хорды. Получают точку, от которой внутрь кривой смещают хорду на длину среднего перемещения b2. вращая ее вокруг первой точки на кривой. Получают вторую точку на кривой. Затем продлевают предыдущую хорду. Для получения связующих точек действия повторяют, каждый раз откладывая длину хорды и величину среднего перемещения от конца хорды, размещенной вдоль предыдущего направления.
5.7.1. Для разбивки кривой способом полярных координат находят главные точки кривой (точки начала, середины и конца кривой). В точках начала (НК) и конца кривой (КК) восстанавливают перпендикуляры к центру О (рис. 5.6). В точке пересечения перпендикуляров О - центре круговой кривой - устанавливают нулевой штрих мерной ленты (рулетки, троса), протянутой к главной точке кривой. Убедившись, что расстояние до них равно радиусу кривой, направляют мерный прибор в сторону определенной точки кривой и, отмерив им длину радиуса кривой, забивают колышек, обозначающий положение этой точки на кривой.

Рис. 5.5. Вид детальной разбивки горизонтальной кривой способом продолженных хорд

Рис. 5.6. Вид детальной разбивки горизонтальной кривой способом полярных координат из центра кривой
5.7.2. В тех случаях, когда длина мерного прибора меньше радиуса кривой. радиус откладывают в несколько приемов по предварительно намеченным створам.
5.7.3. Если работа ведется дальномером, то положение точки на кривой устанавливается перемещением рейки вдоль центрального створа до получения по ней предвычисленного значения (или разности отсчетов), соответствующего радиусу кривой. Наиболее быстро такие отсчеты производятся светодальномерами, имеющими цифровое табло с результатами измерений до вех с триппельпризменными отражателями. Целесообразен и метод последовательной установки из центра кривой вдоль радиусов ряда колышков с определением до них расстояний по дальномеру. Затем, взяв разности между полученными дальномерными расстояниями и радиусом, откладывают их в соответствующем направлении от колышков, получая точки на кривой.
5.8.1. Направление поперечного створа по нормали к трассе на кривой устанавливают для разбивки элементов земляного полотна и расположенных на нем искусственных сооружений.
5.8.2. Нормаль к круговой кривой разбивается несколькими способами:
восстановлением перпендикуляра к середине хорды, разбивкой биссектрисы угла между двумя хордами одной и той же длины, построением угла между начальной хордой и нормалью или построением магнитного азимута нормали в заданной точке кривой.
5.8.3. Для восстановления перпендикуляра к середине хорды из ее концов делают двойную засечку отрезком одной и той же величины, превышающим 2/3 длины хорды (рис. 5.7). Полученные две точки соединяют между собой, образуя перпендикуляр к хорде или нормаль к кривой в точке, расположенной в середине хорды.
5.8.4. Построение нормали с помощью биссектрисы угла ?, образованного между двумя хордами одной и той же длины, выполняют из точки кривой, расположенной между двумя смежными с ней точками кривой и отстоящими от нее на одном и том же расстоянии (рис. 5.8). Установив теодолит между двумя хордами, визируют последовательно на каждую смежную точку кривой и берут отсчеты а и b. Устанавливают отсчет с. равный полусумме отсчетов на смежные точки, с =(а+b )/2 и соответствующий направлению нормали кривой в точке стояния прибора.

Рис. 5.7. Схема восстановления перпендикуляра к середине хорды методом линейной засечки

Рис. 5.8. Построение нормали на кривой с помощью теодолита

Рис. 5.9. Построение угла между направлением начальной кривой и нормалью к кривой

Рис. 5.10. Схема определения нормали и кривой по магнитному азимуту
5.8.5. Для построения теодолитом угла ?п в заданной точке кривой (рис. 5.9) необходимо произвести расчет. Угол определяется по формуле
где n - порядковый номер точки на кривой или число интервалов разбивки кривой;
lк - длина интервала между точками разбивки;
?=lк /R - угол дуги интервала разбивки кривой;
R - радиус круговой кривой.
Теодолитом откладывают величину этого угла от начальной хорды и получают направление нормали.
5.8.6. Для отложения магнитного азимута нормали (рис. 5.10) устанавливают теодолит в точке начала (конца) кривой и по буссоли находят магнитный азимут касательной Ат. Далее устанавливают теодолит в одной из точек кривой, ориентируют нуль лимба по буссоли на север. рассчитывают азимут нормали Ап ? или Ап ?? и откладывают его на лимбе. Из рис. 5.10 видно, что азимут нормали для любой ветви кривой Ап ?=Ат ± ? или Ап ??= Ат ± п?. где ? =90° - п? .
5.8.7. Нормали для клотоидных кривых получают с помощью магнитного азимута построением угла между хордой и нормалью. Для построения угла ? в точке клотоидной кривой между направлением на начало кривой и нормалью, рассчитывают величину этого угла (см. рис. 5.9). По аналогии с рис.5.10 он определяется по формуле ?нк =90?-n ? при ?п =п 2 / 2 к (2А 2 ), где А - параметр клотоиды; ?п - угол между касательными к клотоиде в начальной и определяемой точках. Величина угла откладывается теодолитом от направления на начало кривой.
5.8.8. Построение магнитного азимута Ап нормали к клотоидной кривой выполняется теодолитом. Установив теодолит в точке начала клотоиды, находят по буссоли магнитный азимут касательной Ат. Затем, поставив теодолит в заданную точку кривой, по буссоли ориентируют нуль его лимба на север и по лимбу откладывают азимут нормали клотоиды Ап ? или Ап ??. По аналогии с рис. 5.10, Ап ?= Ат ± ?п ±90? или Ап ??= Ат ± п 2 / 2 к (2А 2 ).
Отложив азимут, получают направление нормали к клотоидной кривой.
5.9.1. В этом способе прямоугольные координаты ?n и ?n откладывают вдоль оси ?. направленной по тангенсу от точки начала (конца) кривой, и по перпендикуляру к нему, являющемуся осью ? (рис. 5.11).
5.9.3. Ординаты ?n являются поправками к проектным отметкам точек расположенных вдоль касательных к вертикальным кривым.
5.10.1. В данном способе (рис. 5.12) устанавливают значения горизонтальных абсцисс ln и вертикальных ординат hn . отсчитываемых от нулевой точки кривой. Разбивку производят через интервал lв в обе стороны от нулевой точки.
5.10.2. Значения координат, отсчитываемых от нулевой точки кривой, устанавливают по формулам ln =Rвin ; hn= 1/2Rвin 2 где in -уклон касательной к кривой в заданной точке; Rв - радиус вертикальной кривой.

Рис. 5.11. Вид детальной разбивки вертикальной кривой способом прямоугольных координат

Рис. 5.12. Вид детальной разбивки вертикальной кривой от ее нулевой точки
6.1.1. Комплекс геодезических работ при строительстве сооружений, обеспечивающий установку и перемещение рабочих органов строительных машин в пространстве в соответствии с заданным проектным положением, относится к геодезическому управлению работой строительных или монтажных машин. Различают ручное, полуавтоматизированное и автоматизированное геодезическое управление. Оно может обеспечивать одновременную работу как одной, так и нескольких машин.
6.1.2. Геодезическое управление работой машин выполняется на каждом заданном проектном участке отдельно специальной геодезической службой строительства.
6.1.3. Ручное геодезическое управление предусматривает установку на местности различных приборов, отдельных устройств или специальных знаков в такое положение. при котором водитель механизма с их помощью в течение всей работы непрерывно видит заданное (проектное) положение рабочего органа своей машины и в соответствии с ним проводит все строительные работы.
6.1.4. При полуавтоматическом геодезическом управлении перемещение рабочего органа механизма вдоль установленною геодезистами заданного положения частично осуществляется специальными автоматическими устройствами, а частично - водителем механизма.
6.1.5. При автоматическом режиме работы рабочие органы строительных механизмов двигаются автоматически по заданному геодезистами направлению.
6.1.6. Геодезическое управление машинами должно обеспечивать комплексную механизацию строительного производства при одновременной работе целой группы специализированных высокопроизводительных машин в наиболее эффективном режиме. Работа каждой строительной машины в таких комплексах должна выполняться качественно в соответствии с ее мощностью и расчетной производительностью.
6.1.7. В настоящее время существует несколько систем геодезического управления работой строительных машин: система непрерывного визуального управления плановым и высотным положениями рабочих органов машин относительно проектных геометрических параметров сооружения; система управления, в которой вдоль натянутой копирной струны, установленных рельс форм, бортового камня, лазерного или светового луча (плоскости), задающих необходимое направление и высоту, перемещается датчик, преобразующий в электрические сигналы отклонения рабочих органов машин от проектной поверхности; системы дистанционного управления с применением визирного луча геодезического прибора и управления строительными машинами по предварительно рассчитанным координатам с автоматическим введением поправок в положение механизмов при отклонении их рабочих органов от заданной траектории.
6.1.8. При геодезическом управлении работой землеройных машин обычно используют системы непрерывного визуального слежения и наклонной или горизонтальной лазерной (световой) плоскости. Значительно реже используется система дистанционного управления визирным лучом геодезического прибора. При планировке корыта и устройстве слоев дорожной одежды следует использовать системы геодезического управления через различные копирные механические или лазерные устройства.
61.9. Геодезическим управлением работой машин должно обеспечиваться непрерывное движение рабочих органов работающих механизмов вдоль заданного положения, при котором водители механизмов либо сами приводят их в заданное положение, либо наблюдают за правильностью работы следящей автоматизированной системы механизма, за соблюдением ею этого положения.
6.1.10. При строительстве проезжей части автомобильной дороги геодезическим управлением работой машин должна обеспечиваться заданная ровность корыта, слоев основания и покрытия, равномерность распределения строительных материалов в слоях дорожной одежды. Это определяет равнопрочность строительства дорожной одежды на всем протяжении дороги при наиболее экономном расходовании строительных материалов и достижении наибольшей ровности поверхности каждого слоя дорожной одежды и покрытия.
6.2.1. Для ручного управления при непрерывном визуальном сложении направление движения механизма в плане определяется установкой створных вех вдоль движения машины, а по высоте - установкой горизонтальных планок вех-визирок на заданной проектной высоте.
6.2.2. Створные вехи устанавливают параллельно оси сооружения в створе с глазом водителя механизма (рис. 6.1), а планки вех-визирок - со стороны места водителя, за пределами работ, параллельно заданной проектной плоскости с учетом положения глаза водителя относительно рабочего органа механизма (рис 6.2).
6.2.3. Максимальная удаленность вех не должна превышать 100-150 м, а горизонтальных планок вех-визирок - 60-70 м. Длина горизонтальных планок вех-визирок а. установленных с интервалом в 20 м, должна удовлетворять условию (рис. 6.3) а>b /2, где b - расстояние между родителем и створом вех-визирок. При большем расстоянии водителя от такого створа устанавливают дополнительный ряд визирок или сокращают интервал их расстановки.

Рис. 6.1. Схема установки створных вех в плане:
1 - глаз наблюдателя; 2 - вехи-визирки; 3 - визирки на рабочем органе механизма

Рис 6.2. Схема установки створных вех по высоте

Рис. 6.3. Схема расстановки оси в зоне работы механизме

Рис. 6.4. Экран для задания направления строительной машине
6.2.4. Направления задаваемых створов следует размещать на уровне видимости водителя машины вдоль направления движения механизма. Положение рабочего органа машины при этом должно фиксироваться на том же уровне специальным визиром, вехой, маркой или экраном с точкой (рис. 6.4).
6.2.5. В тех случаях, когда управление работой машины ведется из ее кабины, у ветрового стекла перед правым глазом водителя устанавливается крест-визир, вертикальная линия которого параллельна оси движения машины.
6.2.6. Для того чтобы водитель мог контролировать работу механизма, перед ним должны быть установлены ряд створных вех или вех-визирок, причем одна из них всегда должна быть контрольной (дополнительной).
6.2.7. Передвижение машин в продольном направлении задается вехами, остановленными параллельно оси сооружения или его элемента в створе с наблюдателем-водителем или передается с кромки рабочего органа машины водителю системой зеркал или призм. При продольном движении (рис 6.5) и наблюдении через системы зеркал или призм направление устанавливается с учетом смещения створа. Если движение машины ведется поперек оси сооружения (рис 6.6), то смещение створа от бровки полотна ?l соответствует расстоянию между положением рабочего органа машины и местоположением водителя механизма.
6.2.8. Расстановка на местности ряда точек со специальными визирными знаками, обеспечивающими постоянную видимость водителем заданного проектного положения относительно рабочего органа машины. должно быть выполнено за пределами зоны работы механизмов. В качестве мест размещения таких знаков следует рекомендовать участки, прилегающие к контуру элемента строящегося сооружения, или территории смежных участков, где в период строительства данного элемента сооружения каких-либо других строительных работ не производится.

Рис. 6.5. Схема управления строительным механизмом при продольном перемещении вдоль оси сооружения

Рис. 6.6 Схема управления строительным механизмом при поперечном перемещении:
1 - линия визирования; 2 - створные вехи; 3 - бровка полотна
6.2.9. Интервалы размещения знаков геодезического управления работой машин должны соответствовать точности производства строительных работ.
6.2.10. На прямолинейных участках дорожного полотна с однородным продольным уклоном (рис. 6.7) визирки должны устанавливаться за кромкой полотна через определенный интервал d0 с таким расчетом, чтобы точность наблюдения за положением рабочего органа машины относительно заданного не выходила за пределы допустимых колебаний высот ?hпр. а створность бровок и кромок элементов дорожного полотна не выходила за пределы допустимых отклонений от створок ?lпр. В соответствии с этим при визуальном наблюдении за створностью визирок и вех их расстановка должна быть в соответствии с погрешностями работы машины и ее управления ?lпр /dпр =К?/3438??К?/3500, где К? - коэффициент учета погрешностей, влияющих на точность визирования.
Если предельная погрешность не выходит за пределы ?l ?пр. то максимальное расстояние между крайними вехами створа (наиболее удаленной вехой и вехой машины) не должно превышать d ?пр =1K 3500 ?l ?0
Например, при предельной погрешности: ?lпр 0.05м; K =2; d ?пр ?90м.
Принимая в качестве предельной погрешности соблюдение ровности поверхности земляного полотна за счет сворности визирок ?h ?=0,02м, предельная удаленность крайней визирки не должна превышать dпр с =40. 60м. Для того чтобы три створные визирки свободно проектировались на ребро визирки (см. рис. 6.7), установленной на рабочем органе машины (на ноже бульдозера, грейдера, скрепера и др.), интервал между ними должен быть, около dпр /3 или d0 =15. 20м, а длина планки визирки на машине должна быть, оптимальной. Она должна соответствовать углу обзора водителем территории участка работы строительной машины, т.е. должна быть близка ширине ножа или габариту машины.
6.2.11. Возвышение верха (ребер) планок всех визирок комплекса (не менее трех, установленных на местности вдоль бровки полотна, и одной на рабочем органе машины) относительно заданной (проектной) линии или плоскости должно соответствовать высоте точки визирования (глаз водителя) над такой заданной; линией или плоскостью (рис. 6.8). При дистанционном управлении строительными машинами точность визирования становится выше на величину увеличения трубы геодезического прибора и предельное расстояние установки прибора от механизма будет значительно больше.

Рис. 6.7. Схема установки визирок на прямолинейном участке

Рис. 6.8. Схема установки визирок по высоте

Рис 6.9. Схема регулирования положения ножа бульдозера по высоте

Рис. 6.10. Схема регулирования положения ковша экскаватора
6.2.12. При дистанционном управлении из заданной створной точки визирная ось геодезического прибора (обычно теодолита) устанавливается параллельно заданному (расчетному) направлению. Управляемая строительная машина, находящаяся в исходной точке, устанавливается чтобы ее рабочий орган совпадал с заданным расчетным положением. Визирная марка рабочего органа машины при этом должна совмещаться с визирной осью геодезического прибора. При движении машины вдоль заданного направления ее водитель наблюдающий в геодезический прибор, следит за тем, чтобы визирная ось его трубы все время проектировалась в центр марки или планшета расположенного на рабочем органе машины. Как только возникнет отклонение центра марки (планшета) от визирного луча прибора, водитель с помощью специального кнопочного устройства дистанционного управления машины возвращает ее рабочий орган в заданное положение. При этом центр марки вновь совмещается с визирной осью прибора. Перемещение рабочего органа с помощью такого дистанционного управления может производиться как по радио, так и через кабельную связь.
6.2.13. Разработку выемок и отсыпку насыпей ведут с таким расчетом, чтобы при их окончательной отделке добор грунта (срезка без подсыпки) не превышал 5-10 см. При окончательной отделке поверхности земляного полотна придают поперечные уклоны и кривизну поверхности в соответствии с проектом.
6.2.14. При отделке земляного полотна бульдозером или грейдером целесообразно к его ножу крепить жесткий флажок, а устанавливаемые на бровке земляного полотна или корыта разбивочные колышки ставить в соответствии с возвышением низа флажка над проектной поверхностью hф (рис 6.9).
6.2.15. При разработке грунта экскаватором линию визирования можно помечать чертой на рукоятке ковша при отвесном положении рукоятки (рис. 6.10).
6.3.1. Для автоматизированного геодезического управления широко используются различные механические копирные устройства в виде натянутой струны. спланированной поверхности корыта или готового основания покрытия смежной полосы в виде линии ограничительного борта или бруса, по которым скользят датчики рабочих органов машины. Электрические сигналы от датчика фиксируют отклонение рабочей части механизма от заданного положения и воздействуют на ее управляющее устройство для установки рабочего органа и заданное положение.

Рис. 6.11. Схема управления бульдозером с помощью лазера
6.3.2. При обозначении на местности заданного проектного направления лазерным лучом (лазерным теодолитом, нивелиром, визиром) или лазерной плоскостью геодезического прибора системы СКП-1, САУЛ-1, лазерпланом или другим прибором на машине устанавливается фотоприемное устройство с центральной точкой заданного положения рабочею органа. На фотоприемник проектируется пятно лазерного луча или линия лазерной плоскости, по положению которых относительно центральной точки автомат или водитель механизма управляет рабочим органом машины. Когда на рабочем органе машины установлен фотоприемник-матрица (ФП) (рис. 6.11), передающая положение лазерного луча относительно его нейтральной точки, управление может производиться автоматически или через лампочный индикатор, расположенный в кабине водителя механизма. В каждом таком варианте перемещений рабочего органа машины производится в соответствии с сигналами, полученными от ФП. Кроме них, имеются градуированные сетки-экраны (рис. 6.12), указывающие по положению светового пятна или линии на экране величину смещения в данный момент рабочего органа машины относительно заданного центрального положения.
6.3.3. При возведении земляного полотна с применением лазерных систем САУЛ и СКП-1 или системы ПУЛ-3 используются дорожные машины с гидроприводом рабочего органа.
6.3.4. Для земляных работ с применением СЛУЛ, СКП-1, ПУЛ-3 необходимо: центрировать направляющую станцию над одной из точек исходной линии, расположенной вне зоны производства земляных работ; ось луча направляющей станции ориентировать на начальную точку зоны производств работ; от полученного положения оси дороги выполнить разбивку высоты разрабатываемого (отсыпаемого) слоя земли; задать проектный уклон лучу прибора; при включенной автоматической системе приемной станции, смонтированной на отвале автогрейдера, ноже скрепера, бульдозера произвести работы по отсыпке слоя (или планировке) под заданную лучом прибора плоскость. После отсыпки (разработки) слоя переставить направляющую станцию на высоту следующего отсыпаемого (разрабатываемого) слоя насыпи (выемки).
6.3.5. Основные пункты установки приборов геодезического управления работой матчи при устройстве земляного полотна следует размещать, в точках нулевых работ и точках перелома проектной линии в плане и профиле. На участках горизонтальных и вертикальных кривых такие пункты назначают в точках начала и конца каждой кривой.
6.3.6. Современное строительство бетонного покрытия автомобильной дороги ведется специальным комплектом машин ДС-100, ДС-110 и другими со скользящими формами (подвижной опалубкой и автоматической следящей системой). Качество работ такого комплекта высокопроизводительных машин обеспечивается геодезическим управлением и настройкой его рабочих органов.
6.3.7. Геодезическое управление осуществляется копирной струной, устанавливаемой и укрепляемой на специальных стойках со струбцинами и натягиваемой вдоль участка специальной лебедкой. На закруглениях стойки со струбцинами устанавливаются с таким интервалом, чтобы укрепляемая на них копирная струна, образуя ломаную линию вдоль хорд кривой, обеспечивала проектное очертание (рис. 6.13).

Рис. 6.12. Сетка-экран со световым пятном луча лазера

Рис. 6.13. Схема установки копирной струны на закруглении:
1 - проектная кривая: 2 - струбцины; 3 - копирная проволока
Перед началом работ рабочие органы комплекта машин устанавливают в исходное положение и особенно тщательно выравнивают ножи отвалов профилировщика. Правильность их установки определяется после пробного прохода. Просвет под 3-метровой рейкой после такой пробы должен быть не больше 3 мм.
6.3.8. Перед работой машину устанавливают вдоль оси укладываемой полосы дороги на ровной площадке так, чтобы ось машины (центр рабочего органа) совпадала с осью полосы. Затем по указаниям геодезиста рама машины устанавливается горизонтально. После этого в машине регулируют элементы автоматической системы слежения ровности, ставят машину в исходное положение, подвигая щуп датчика к струне и регулируя его положения элементами крепления. Положение контролируют по индикаторным лампочкам на пульте управления. Окончательно систему настраивают при ее включении в автоматический режим.
6.4.1. На горизонтальной или вертикальной кривых расстановку визирок следует производить через интервал d0 при величине стрелки между кривой и хордой fпр . При известном радиусе кривой R и дуги кривой К0. хорда которой равна длине интервала d0 (рис. 6.14), величина стрелки
Значение погрешности в определении стрелки f зависящей от погрешности в определении длины дуги К0. следует устанавливать по формуле:
6.4.2. При строительстве автомобильных дорог на кривых с радиусами R >1000 м можно допускать интервал расстановки визирок и вех d = К0 ?20м. В этом случае fпр ?1/20?5 см, а ее погрешность ?Fпр ?1/200?0,5 см.

Рис. 6.14. Схема установки визирок на кривой

Рис. 6.15. Схема расстановки визирных вех на закруглении
Эго показывает, что хорда горизонтальной кривой d0 ?20 м может заменять кривую при радиусах кривой дорожного полотна более 1 км. Принимая к расчету элементы вертикальной кривом с радиусом R >5000 м, при интервале d. Kbпр ?20 м получим fbпр =1 см и ?fb= 0,1 см, что вполне обеспечивает точность работ при строительстве дорожных одежд укладочными машинами на вертикальных кривых с радиусами более 5 км.
6.4.3. Расстановку визирных вех и их горизонтальных планок следует производить с таким расчетом, чтобы в процессе движения машин при интервале разбивки кривой длиной К0 водитель мог непрерывно наблюдать один створ хорды за другим, переключая свои взгляд со створа одной хорды на створ последующей. При этом желательно, чтобы установленные вехи и визирки могли обеспечивать движение машин как в прямом, так и в обратном направлениях по кривым (рис. 6.15).
6.4.4. Автоматизированное перемещение рабочих механизмов в пределах кривых в плане и профиле при использовании проволочных и других линейных копиров с датчиками механического типа ведется вдоль хорд к дугам.
При этом интервалы между изломами должны соответствовать , где R - радиус кривой, fпр - допустимая стрелка прогиба кривой относительно хорды.
6.4.5. Установка копиров на сложных участках строительства при наличии на них горизонтальной и вертикальной кривых с отгоном виража и уширением дорожного полотна требует аналогичного расчета и в вертикальной плоскости.

Рис. 6.16. Схема управления лазерным лучом на криволинейном участке

Рис. 6.17. Схема перемещения фотоприемного устройства на рабочем органе машины:
1 - рабочий орган; 2 - рама установки ФН; 3 - подвижная штанга; 4 - ФН
6.4.6. В автоматизированных системах геодезического управления следует использовать дополнительные устройства, блоки призм, обеспечивающие перемещение луча в соответствии с криволинейным участком (рис. 6.16) либо, сохраняя лазерный луч неподвижным, перемещать фотоприемное устройство относительно нижней и одной из боковых кромок рабочего органа машины (рис. 6.17). Для этого необходимо создать следящую систему таких перемещении, работающих с необходимой точностью. Эта система с программным управлением связана с нарастанием расстояния по мере перемещения механизмов вдоль кривой от исходной точки и с параметрами кривой.