








 Рейтинг: 4.0/5.0 (1896 проголосовавших)
Рейтинг: 4.0/5.0 (1896 проголосовавших)Категория: Инструкции
Вы можете купить данный товар с доставкой по всей Украине
ОписаниеОбновленная версия контроллера полетов Naze32 6 DOF rev6 - это один из самых популярных контроллеров для гонок с акро управлением и FPV полетами на квадрокоптерах всех мини классов начиная от рам размером 130мм и до 280мм.
Особенности версии rev 6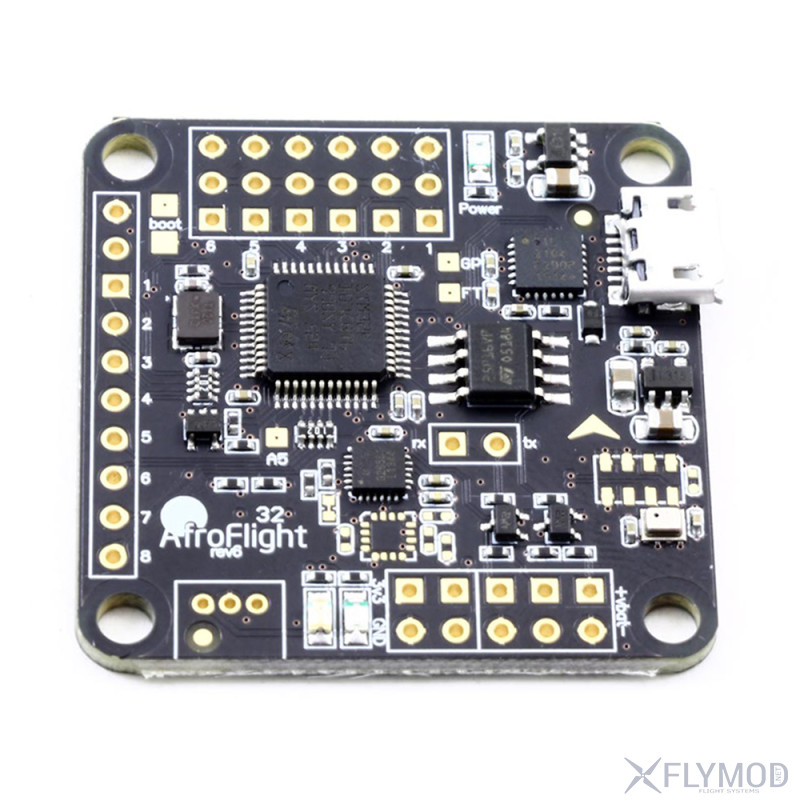
















Стандартная прошивка - BaseFlight. улучшенная - CleanFlight. Есть также Harakiri - это единственное (на август 2015) ПО для Naze32 с возвратом по FailSafe.
Версии [править ]
слетел usb драйвер стм-ки. попробуйте перепрошить.
А что, можно как то отдельно установить usb драйвер ?
Перепрошивал в режиме boot в cleanfly, basefly и в betafly разными прошивками. При подключении к клинфлаю он распознает прошивку и ее версию, но дальше говорит: No configuration received. Затем после продолжительного ожидания открылся CLI и даже отвечает на команды, правда там каракули какие-то.
Всем спасибо! Вылечилось чисткой платы спиртиком. Вчера выпаивал разъемы и видимо посадил соплю где-то.
Последний раз редактировалось mcl065; 19.08.2016 в 11:50.

Регистрация 15.07.2013 Адрес Москва Возраст 35 Сообщений 531
Вопрос всё ещё актуален.

Регистрация 09.01.2012 Адрес Нижневартовск Возраст 35 Сообщений 315
Slavius.ru Вопрос всё ещё актуален. Можете, я подключал, все норм.
Регистрация 13.01.2016 Адрес Альметьевск Возраст 40 Сообщений 14
Вместо сдохшего Naze32 купил SP F3, хотел поставить в штатное место платы распределения, а контакты выводов на регули не совпадают. Возможно ли переназначить, чтобы вывод 4-го мотора работал как 1-ый, 5-го как 2-ой и т.д.
Так не хочется перебирать квадрик.
Видео вам в помощь:
комп и OSD вместе не работают. вернее конфликтуют .
Это то я уже понял.Плата работает при подключении батареи, сом порт определяется. Клинфлай- конекта нет. через бут не шьется, в настройки не заходит, рх тх - как я понял не работает, получается контроллер летает. но прошить или изменить настройки нельзя. Я понимаю, что то сгорело ,но вот что. Или уже просто заказать новый контроллер?
Хоть в БейсФлайт хоть КлианФлайт диапазон должен быть 1000-1500-2000.
Настраивается в передатчике субтитрами и крайними точками.
Если не настроите мод, то грохнете коптер. Т.к. Мануал с не привычки, сложный режим, без стабилизации в горизонт.
Так что как минимум Angle режим надо настроить.
Почитайте инструкцию к вашей прошивке, а то отсутствие Арминга будет меньшей из ваших проблем.
Поищите на ютюбе David Vindestal у него есть очень хорошее видео по настройке Naze32 как раз на трикоптере.
Спасибо за совет, все настроил, единственный момент постоянно жужжит серва на 3 луче трикоптера даже при отсутствии команды с передатчика, запас в обе стороны вроде есть, нет такого, что серва в крайней точке.
Регистрация 22.07.2013 Адрес Санкт-петербург Возраст 41 Сообщений 1,877 Записей в дневнике 15
Спасибо за совет, все настроил, единственный момент постоянно жужжит серва на 3 луче трикоптера даже при отсутствии команды с передатчика, запас в обе стороны вроде есть, нет такого, что серва в крайней точке.
По Серве задавайте вопрос в теме по трикоптерам. То ли мозг постоянно пытается, что то стабилизировать, то ли Серва в каком то пограничном положении.
Регистрация 01.04.2008 Адрес Москва СЗАО Возраст 36 Сообщений 1,337
[QUOTE=Rinofly;5916250]В программе выруби battery monitoring. У тебя vbat не подключен, не так ли? Мозг не видит батарею и думает что она села в 0
Спасибо, всё заработало
Учит правила (до 12.10.2016) Регистрация 12.10.2010 Адрес Одесса Возраст 38 Сообщений 1,718
После падения наза просто погасла и больше не завелась.
Но благодаря вот этим постам удалось восстановить назу.
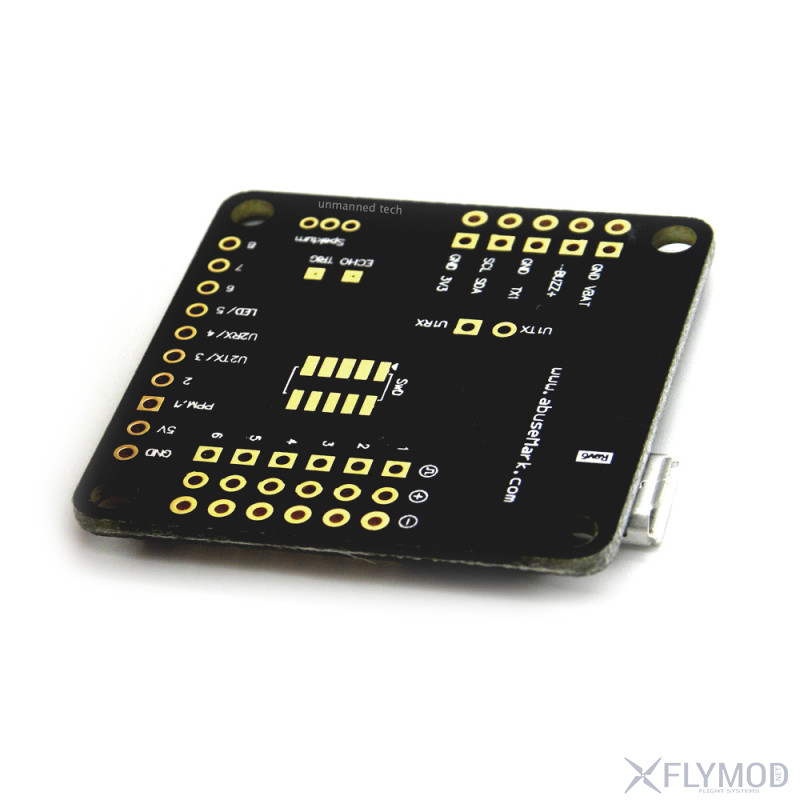
По месту пожара: 1 и 9 ноги контроллера это питание, 4 нога не задействована (но на неё подаётся тоже питание, или просто проходит через неё см. фото) 8 нога это земля, 7 нога это ресет и она идёт на JTAG и через сопротивление 4,7 кОм на питание (но это по старой схеме для NAZE32 rev4).5 и 6 ноги это на кварц.
В общем похоже на проблемы по питанию (переплюсовка или 12 вольт подали на проц). я если честно не спец, так балуюсь.
Да и забейте вы на причину, срежьте СТМку и гляньте на дороги которые погорели. А потом впаяйте STM32F103CBT6 или STM32F103C8T6 (что найдёте в магазине). Режьте аккуратно, только сверху вниз (никак не сбоку, хотя там ножки тоньше), иначе дорожки порвёте (я первый раз срезал и порвал, так что осторожно).
Ловите фотки может разберётесь.Вложение 1096013 Вложение 1096014
Схема для NAZE32rev4 здесь http://code.google.com/p/afrodevices. aze32_rev4.pdf
Удачи, я к сожалению в отпуск ухожу, но вечером 7 ногу попробую прозвонить куда она идёт.
Вам нужна программа flash loader demonstrator и с ее помощью перезалить hex файл.
Все это описано в инструкции к Naze32.
Перед подачей питания boot замыкаете, загорается синий светодиод, перемычку снимаете, открываете flash loader demonstrator и заливаете hex файл cleanflight_NAZE.hex
Таким методом восстановил две платы.
Если файл не найдете могу выслать на почту, тут я не знаю как его прикрепить.
Спасибо парни, что делитесь опытом!
Ребята, время читать 45стр. особо нет, нужна помощь купил Flip32 c Baro которая rev6. Есть куча вопросов и проблем.
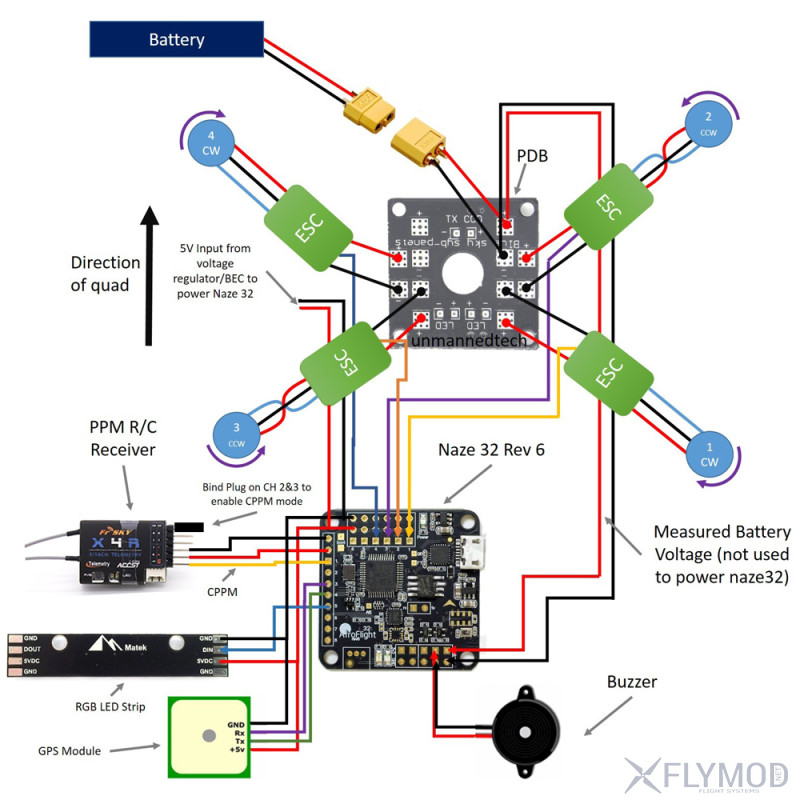
На Naze32 подключается к выходу RC5, думаю на flip32 должно быть аналогично. После этого на вкладке Configuration необходимо поставить галочку LED_STRIP и настроить диоды на вкладке LED Strip.
Подробная инструкция по RGB LED - github.com/cleanflight/cleanflight/…/LedStrip.md
Неплохая видео инструкция - HPIGUY | Cleanflight LED's With Naze32 for Miniquads
Подходит простейшая пассивная пищалка (важно выдержать полярность). После ее установки появятся звуковые сигналы при низком низком заряде аккума(необходимо настроить), калибровке, триммировании, переключении профилей и т.д.
Для того, чтобы она пищала при переключении тумблера необходимо на вкладке Modes добавить диапазон срабатывания на соответствующий AUX для режима Beeper.
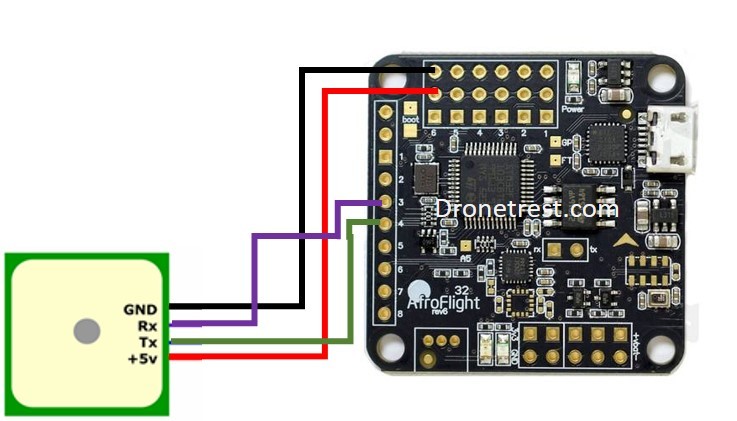
Для телеметрии и для сигнала о разряженной батарее.
На Naze32 подключается к выходу RC5, думаю на flip32 должно быть аналогично. После этого на вкладке Configuration необходимо поставить галочку LED_STRIP и настроить диоды на вкладке LED Strip.
Подробная инструкция по RGB LED - github.com/cleanflight/cleanflight/…/LedStrip.md
Неплохая видео инструкция - HPIGUY | Cleanflight LED's With Naze32 for Miniquads
Подходит простейшая пассивная пищалка (важно выдержать полярность). После ее установки появятся звуковые сигналы при низком низком заряде аккума(необходимо настроить), калибровке, триммировании, переключении профилей и т.д.
Для того, чтобы она пищала при переключении тумблера необходимо на вкладке Modes добавить диапазон срабатывания на соответствующий AUX для режима Beeper.
Для телеметрии и для сигнала о разряженной батарее.
Аналогичные и у меня вопросы. С CC3D как то было все очевидно, а тут черт ногу сломит))
Пролейте свет плз на:
Подключение футабовского приемника по SBus - Почитал понял что нужно на первой вкладке поставить галку RX Serial, на второй выбрать тип приемника RX Serial и ниже тип шины Sbus. Приемник подключаем через инвертор к входам контроллера GND -> RC1, “+” -> RC2, Sbus -> RC4
И не важно какая прошивка Cleanflight или Baseflight? (я планирую использовать клинфлайт)
Это верно?
Вытекающий из первого… почитал этот дневник forum.rcdesign.ru/blogs/200975/blog19549.html
сделал вывод, что если я буду использовать футабовский SBus, то не смогу подключить одновременно и GPS и OSD, т.к. один UART занят под USB а другой под SBus
А могу ли я в этом случае задействовать хотябы GPS и куда его подключать, ведь RC4 занят?
Ранее кто-то задавал вопрос мол можно настроить так, чтобы когда коптер дизармлен работал USB, а когда армим работал GPS… вроде ответа не было… такое возможно?
Если всеже нельзя использовать совместно и SBus и GPS, бог с ним, подключаю приемник по PWM, тогда вообще все входы будут заняты и в этом случае тоже GPS не получится задействовать?
Поясните плз softserial - для чего нужен, + и - его использования? что можно на него повесить? вроде как их два, можно в моем случае на один повесить GPS, а на второй OSD ?
Есил п.3-5 не выполнимы то получается для полноценной работы нужен приемник с шиной CPPM, или использовать например такой декодер - “FrSky SBUS to CPPM Decoder” ?
Подключить можно любую ОСД? Подружится с Micro minimOSD? для этого осд предварительно нужно прошить “MWOSD” ?
Спецификация:
Имя элемента: naze32 rev6a контроллер полета
Центральный процессор: stm32f 103cbt6
Датчики: mpu6500
USB в UART: cp2104
Высота: 36мм
ширина: 36мм
Вес: 6 грамм (без заголовков, 8 грамм с)
версия: 6 степенями свободы и 10 степенями свободы
функции:
Контроль напряжения батареи
встроенный FrSky преобразователь телеметрическая
Современный 32-битный процессор (STM32 F103) работает на 3.3V / 72 МГц.
Встроенный контроллер USB для настройки и конфигурации
современный графический интерфейс для всех операционных систем, baseflight конфигуратор
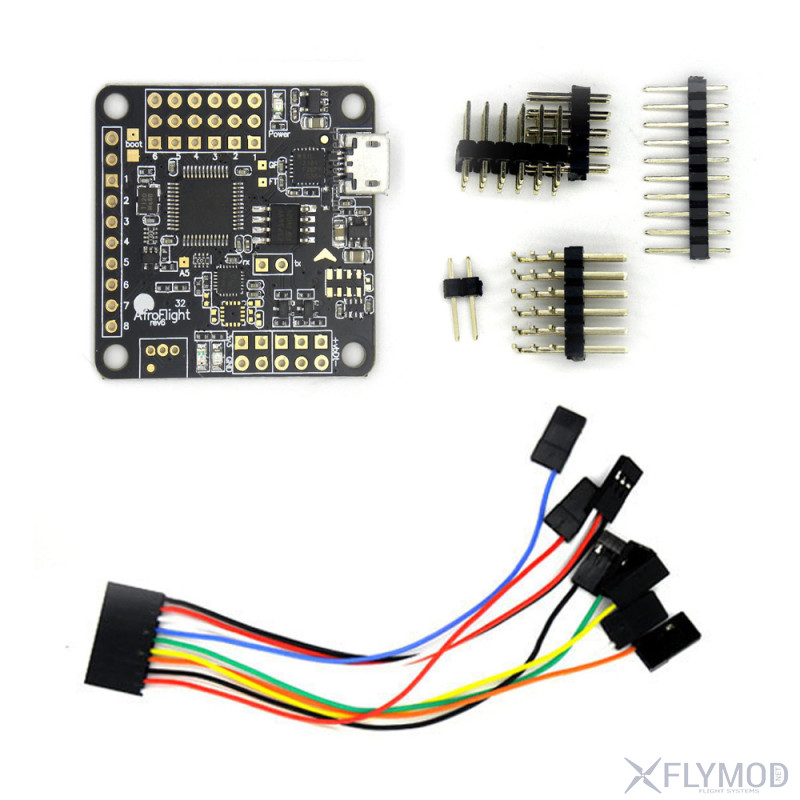
Примечание: если вы не имеете CPPM включен приемник, вам также необходимо приобрести RC многожильного кабеля.
В пакет включено:
6 степенями свободы версия
1 X 6 степеней свободы контроллер полета (без компаса барометра)
10 степенями свободы версия
1 X 10 степенями свободы управления полетом ( с компас барометр)
Naze32 и CC3D — это современные 32-битные полетные контроллеры, в отличии от других 8-битных, таких как KK2.1 или APM. За счет этого они получили преимущество в точности и быстроте вычислений. Эти контроллеры очень популярны в воздушной акробатике, особенно в FPV гонках миниквадрокоптеров. CC3D появился около 4-х лет назад, а Naze32 немного позже.
В этом обзоре я буду сравнивать Naze32 в «Acro» версии, а не полную версию со встроенным компасом и барометром. Есть также еще один полетный контроллер в этом классе под названием «Flip32+». Он очень похож на Naze32 (почти полный клон), поэтому мы не будем на нем останавливаться.
Сравенение аппаратной составляющей: Naze32 vs CC3DЭти полетные контроллеры очень похожи друг на друга: оба размера 36×36 мм и используют 32-х битный процессор STM. Но в Naze32 используется сенсорная микросхема MPU6050 (гироскоп + акселерометр),а CC3D использует MPU6000. Теоретически MPU6050 — это более хороший сенсор в теории, но эти данные обработает прошивка играет не маловажную роль.

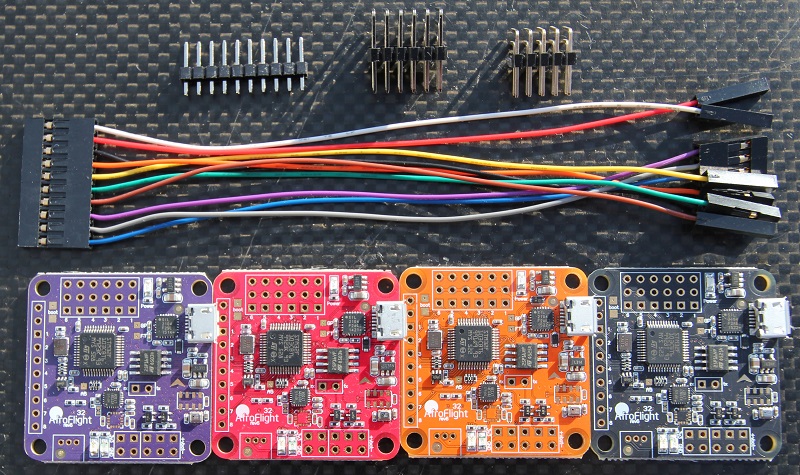
Naze32 выпускается трех цветов.
Подключение к компьютеру: Naze32 оснащен Micro USB разъемом, а у CC3D Mini USB.
Еще одно отличие в разъемах для подключения ESC, у Naze32 — стандартные серво проводники, в то время как в OpenPilot CC3D используется разъем JST. Я думаю, что разработчики пытались увеличить свободное место на плате, но по мне это не совсем удобно.

CC3D выпускается двух цветов.
На плате CC3D USB порт подключен напрямую к процессору. На других платах, таких как Naze32 и Flip32 применяется конвертер с USB в UART, который подключается последовательному порту процессора. Поэтому при смене прошивки на Cleanflight в CC3D вам дополнительно понадобится конвертер USB-Serial.
Сравнение программного обеспечения: OpenPilot GCS против Baseflight и Cleanflight Naze32 и BaseflightВ Naze32 используется Baseflight configurator. Программное обеспечение берет свое начало от Multiwii, в нем есть большое количество параметров, которые вы можете изменять для настройки полетных свойств вашего квадрокоптера.
Baseflight configurator — это приложение для Google Chrome, у него очень простой и строгий интерфейс. Кроме графического интерфейса можно запустить командную строку для настройки всех переменных.

В программном обеспечении от CC3D значительно меньше параметров для настройки. После появления Naze32 многие стали говорить, о ограниченности при работе с GCS. Разработчики прислушались и дали больше свободы пользователям особенно в акро режимах.
OpenPilot GCS — это программное обеспечение с отличным дизайном и дружественным интерфейсом. Однако оно может показаться немного сложным, особенно для новичков.
CleanflightПосле успеха Naze32 и Baseflight, прошивка и конфигуратор были разделены и появился Cleanflight. Это программное обеспечение поддерживает не только Naze32, но некоторые другие полетные контроллеры, такие как CC3D. Sparky и др.

Теперь можно установить обе прошивки на CC3D — OpenPilot или Cleanflight.
На текущий момент, гексакоптеры и октокоптеры не поддерживаются на плате CC3D.
Какую плату выбрать?Трудно решить какая плата лучше. Многие спорят, какая из них лучше в плане производительности. Но я думаю обе платы имеют свою аудиторию и обе неплохо выполняют свою работу. Вы не сможете решить, пока не попробуете обе.
Для меня показалось Naze32 легче подключить к радиоаппаратуре и другим стандартным компонентам, из-за стандартных серво разъемов. Для подключения к кабелю JST на CC3D может потребоваться дополнительная пайка. Так же для меня оказался проще в использовании Baseflight и Cleanflight конфигураторы.
Но цена CC3D примерно на 40% меньше, чем у Naze32. Если вы хотите запустить Cleanflight и вас не беспокоит JST разъем, CC3D будет не плохим выбором. Интересно, что несколько месяцев назад CC3D продавался по цене 69$. Сейчас его цена около 18$.
Прошивка Cleanflight на CC3DСуществует два режима установки прошивки. Первый, вы полностью удаляете OpenPilot и устанавливайте CleanFlight. Второй, вы можете запустить обе прошивки на плате.
Установка Cleanflight с помощью USB UART адаптера.Подключите полетный контроллер CC3D с помощью USB-UART адаптера: 5V, GND, TX и RX к главному порту на CC3D. Далее следуйте инструкциям здесь. так же как вы прошивали Naze32.
После прошивки ваш CC3D определится, как Naze32. Все настройки теперь можно делать через Cleanflight конфигуратор.
Прошивка через GCS без USB UART адаптераВы можете воспользоваться другим способом и следовать инструкциям в этом виде о (январь 2015) или в этом (февраль 2015) для прошивки без usb uart адаптера. Если кратко, вам нужно запустить GCS, вкладка прошивка, нажать кнопку “HALT”. чтобы перевести плату в режим загрузчика, загрузить прошивку Cleanflight FW и прошить. Если вам нужно откатиться обратно на OpenPilot, снова запустите GCS, вкладка прошивка, нажмите «Rescue» и следуйте дальнейшим указаниям. Вам будет нужно скачать образ прошивки OpenPilot и загрузить ее обратно.
Приобрести полетный контроллер CC3D в Иркутске можно в интернет магазине drone-irk.ru
Сборка миниквадрокоптера ZMR250 — клона Blackout.
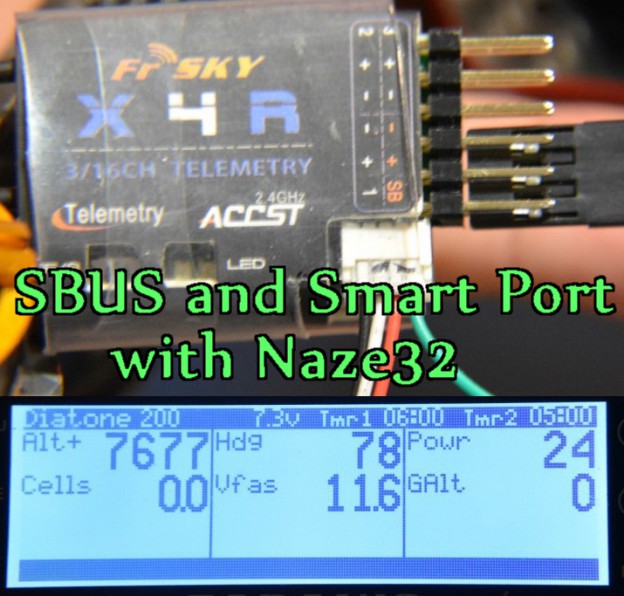
В этой статье мы пройдемся по вариантам использования SBUS и SmartPort Telemetry на плате Naze32 с приемником FrSky X4R-SB.
Этой инструкцией поделился с нами Марсело Тито Фаринон, член нашей группы на FaceBook.
Настройки SBUS и SmartPort очень похожи на разных полетных контроллерах в Cleanflight, разница в оборудовании. Очевидно что Naze32 (на процессоре F1) требует немного больше усилий и работы руками чем в случае контроллеров на процессорах F3 (Tornado, Dodo и т.п.). Но нет ничего невозможного.
Как подключить SBUS к Naze32Как мы уже ранее объясняли в статье про сравнение PPM и SBUS. сигнал SBUS на выходе приемника FrSky инвертирован (т.е. перевернут) и некоторые полетные контроллеры не могут его распознать и понять.
Существует множество способов инвертировать сигнал, например, использовать самодельный инвертер сигналов.
Заметим, что только платы Rev5 и более старые требуют этого, rev6 распознает SBUS без инвертеров.
Инвертер SBUSИнвертер легок в изготовлении, потребуется пара резисторов (10кОм и 4.7кОм), 1 транзистор (BC547b) и один сервокабель. Это очень дешевые и легкодоступные детали. Все хорошо разъяснено в видео:
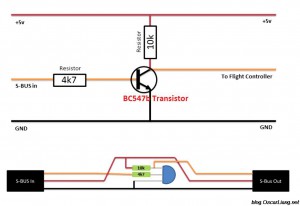
Другой вариант – найти определенный контакт на плате приемника и взять не инвертированный сигнал прямо оттуда. В этом случае инвертер не нужен.

На самом деле на плате приемника есть специальный чип, который инвертирует сигнал. В соответствии со схемой выше, вы можете найти нужный контакт с не инвертированным сигналом для подключения к контроллеру.

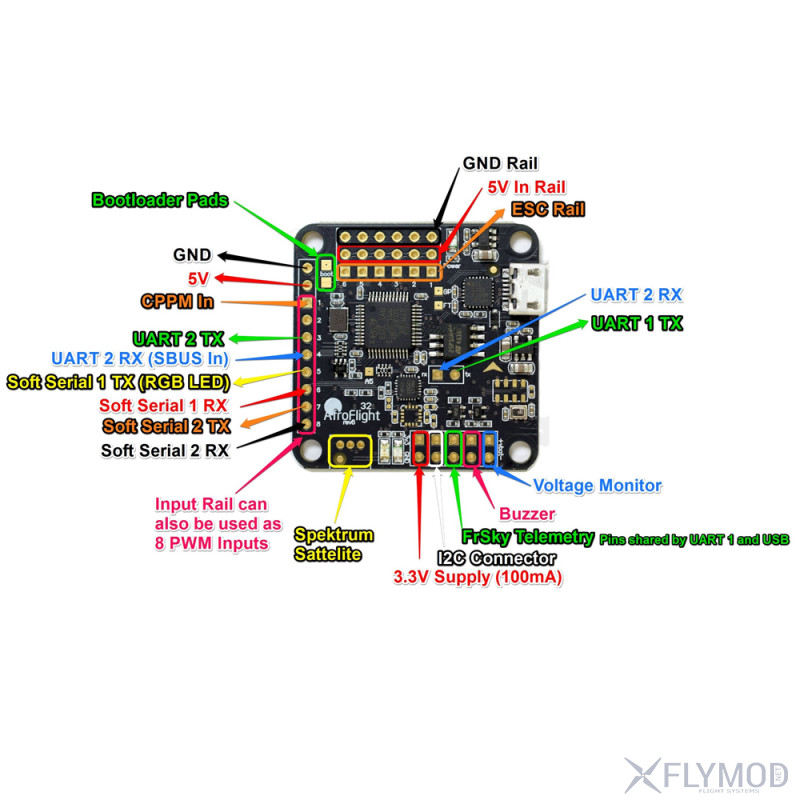
Предположим вы используете UART2 на Naze32, оставляя UART1 для подключения по USB конфигуратора CleanFlight. Вначале нужно включить SerialRX для UART2 на вкладке Port .

Выбрать Serial RX на вкладке Configuration .

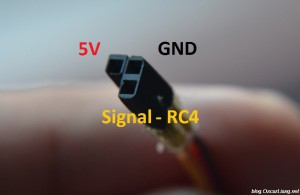
Контакты UART2 это RC3 (TX) и RC4 (RX). Вам нужно подключить выход SBUS к RC4, так как это однонаправленное соединение. RC4 прямо под контактом «-» (земля).
Вы можете сделать кабель типа такого:
Для телеметрии вам снова понадобится последовательный порт. Однако вы этого сделать не можете на Naze32, потому что там всего 2 аппаратных UART и они уже используются: один для подключения SBUS, а второй зарезервирован для подключения по USB.
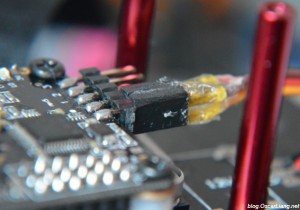
Однако хорошая новость в том, что есть возможность использовать SoftSerial (software serial, программную эмуляцию последовательного порта) для подключения SmartPort. Контакты RC5 и RC6 доступны для SoftSerial на плате Naze32.
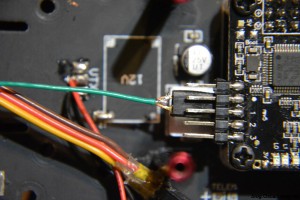
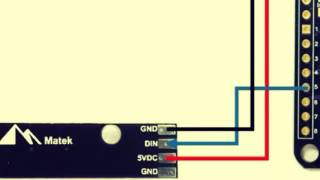
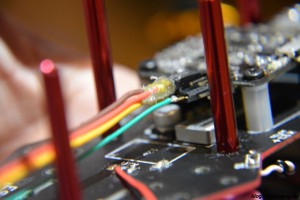
Имейте ввиду, что нужно соединить 2 контакта вместе (RC5 и RC6). Марсело сделал разъем в котором контакты спаяны друг с другом. Другой конец кабеля подключен к SmartPort порту приемника (на картинке зеленый провод).
С приемником D4R-II RX вам нужно подключить телеметрию только к RC6 (softSerial TX), но очевидно, что есть разница с X4R-SB, на котором SmartPort нужно подключить к обоим контактам – RC5 и RC6. Марсело пытался, но у него не получилось, пока он не соединил контакты вместе.

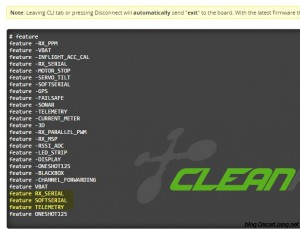
В конфигураторе CleanFlight вы должны выбрать Telemetry и SoftSerial на вкладке Configuration.
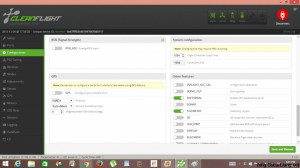
Затем на вкладке Ports выберите SoftSerial1 и SMART PORT, AUTO.
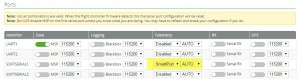
К консоли (CLI) наберите Telemetry Invert = ON или 1, в зависимости от версии CleanFlight. В последней версии используются значения ON и OFF вместо 0 и 1.

И еще раз проверьте в консоли включены ли эти функции.
Как мы узнаем, что SmartPort телеметрия работает?
Итак, чтобы проверить сдвиньте контроллер в любом направлении, и посмотрите меняются ли значения AccX и AccY (если вы не отключили акселерометр). Если постоянно показывается 0, то это может значить как то, что акселерометры выключены, так и то, что телеметрия не работает.

Для отображения правильной высоты, вы должны вначале включать коптер, и только затем Taranis (передатчик). Если вы вначале включите Taranis, он покажет неправильные значения.

Отметим, что в старых версиях прошивки Taranis напряжение основного аккумулятора показывалось как Cells. но теперь это не работает, новое значение – Vfas .
Naze32 с подключенными SBUS и Smartport будет выглядеть примерно так:
На этом все! Если у вас есть что сказать – пишите в комментариях.
Оригинал: Using SBus, SmartPort Telemetry on Naze32 Навигация по записям







